This study presents a bioinspired method for continuous adaptive manipulation of objects using a three-fingered robotic hand. NOKOV motion capture system is utilized to track object posture and validate the proposed control strategy, enabling robust manipulation even under external disturbances.
The virtual guitarist is able to accurately play untrained pieces of music with natural and realistic movements. NOKOV Motion Capture was used to collect fine data of hand training.
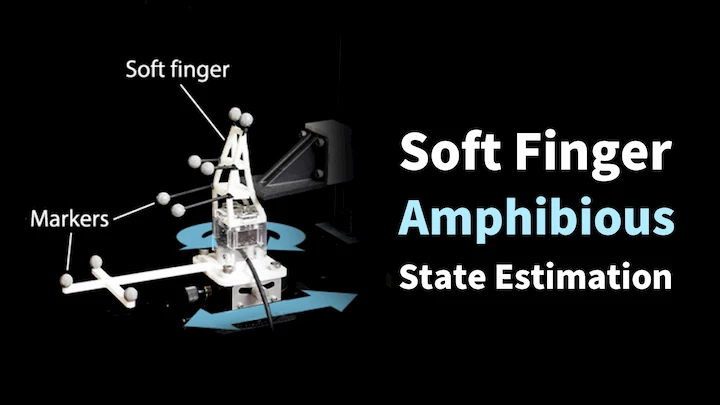
Proprioceptive State Estimation of Amphibious Soft Finger
This article proposed a novel vision-based proprioception approach to estimate the state of the soft robotic finger in real-time and with high fidelity. The approach is benchmarked using NOKOV motion capture system and a haptic device. Both results show state-of-the-art accuracies.
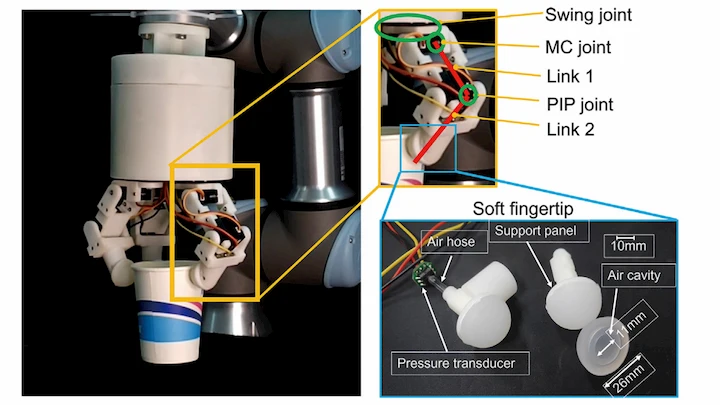
Tactile-Enhanced 6D Tracking of Objects for Robotic Hand
TEG-Track enhances 6D pose tracking of in-hand objects by integrating tactile sensing with visual cues, improving generalizable trackers' performance in both synthetic and real-world scenarios, with the NOKOV system providing ground-truth poses for dataset annotation.
Discover the Mars Series, featuring industry-leading frame rates and ultra-high resolutions. Perfect for advanced motion tracking and measurement in various fields.
Up to 26M pixels resolution, 670FPS
Submillimeter 3D accuracy
Models available for indor, outdoor, and underwater use