
Researchers published an article titled "Continuous adaptive gaits manipulation for three-fingered robotic hands via bioinspired fingertip contact events" in Biomimetic Intelligence and Robotics, exploring techniques to enhance the dexterity and adaptability of three-fingered robotic hands through biomimetic approaches.
The study captured human finger motion data using the NOKOV optical 3D motion capture system, extracted four motion primitives, and designed a gait control strategy based on fingertip contact events. The experiments verified the stability and robustness of the robotic hand under complex tasks and external disturbances, providing new ideas for high-degree-of-freedom biomimetic manipulation.
Citation
Xiaolong Ma, Jianhua Zhang, Binrui Wang, Jincheng Huang, Guanjun Bao,Continuous adaptive gaits manipulation for three-fingered robotic hands via bioinspired fingertip contact events,Biomimetic Intelligence and Robotics,Volume 4, Issue 1,2024,100144,ISSN 2667-3797.
Research Background and Challenges
Traditional robotic hand manipulation methods rely on predefined gaits, lacking adaptability to environmental changes and external disturbances. The main challenges include force and motion control in multi-finger collaboration, changes in contact points and grasping patterns, real-time force feedback adjustment, and how to adaptively switch motion primitives to ensure stable manipulation.
Addressing these issues requires designing a control strategy that can adjust gaits based on real-time contact force feedback, ensuring that the robotic hand can efficiently and robustly complete manipulation tasks in uncertain environments.
Research Contributions
Implemented the control strategy of human finger gaits, where finger gaits in the robotic hand are dynamically switched based on contact force feedback.
Used four motion primitives to compose the finger gaits for object manipulation.
Analyzed the contact events between the fingertips and the object, revealing the continuous translational and rotational manipulation processes of the robotic hand within one cycle. Experimental validation confirmed the feasibility and robustness of this approach. Moreover, even when the object is disturbed by external forces, the robotic hand can promptly adjust its gait to respond to any interference.
Methodology
Human-inspired Gait Control Strategy
Three-dimensional motion data of human fingers and the surface of a spherical object were collected using the NOKOV motion capture system. Reflective markers were placed on the three fingers (thumb, index, and middle fingers) and the surface of the sphere, and 8 cameras recorded the coordinates, speed, and acceleration of each marker.
These high-precision data were used to analyze the trajectories, motion patterns, and dynamic changes in the contact forces of the fingertip, providing theoretical support for the gait planning of the robotic hand.

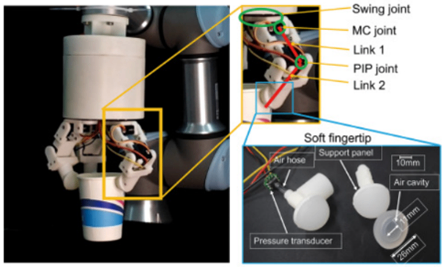
Three-Fingered Robotic Hand Design
A three-fingered robotic hand was designed, with each finger equipped with three degrees of freedom (DOF) joints and flexible sensors to perceive contact forces in real time.
A control strategy based on motion primitives was proposed, where the gait mode is switched through real-time force feedback signals to ensure stability during operations.
Experiments and Results
Gait Adaptive Switching Control Experiment:
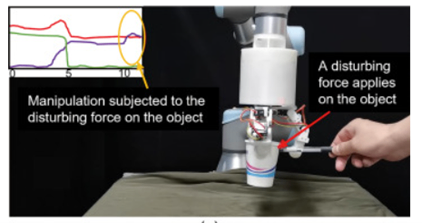
The manipulation of a paper cup was used as the experimental task. The robotic hand adjusted its fingertip position to complete the grasp, with sensors recording the contact force between the fingertips and the object.
The gait time intervals were adjusted based on real-time force feedback signals, and the impact of external disturbances on the grasping stability was monitored.
In this process, the NOKOV motion capture system was used to provide the object's angular velocity, and combined with the data from the contact force sensors, the gait cycle was adjusted in real-time to ensure continuous and stable operation.

Gait Adjustment During Continuous Operation Experiment:
When external interference occurred, the robotic hand detected changes in the contact force and halted the current gait, returning to a safe gait mode to restore force balance.
After the interference was eliminated, the robotic hand was able to return to the original gait sequence and continue the operation.
Experimental Results:
The experimental results validated the effectiveness and robustness of the proposed control strategy. The real-time force feedback mechanism based on contact events enabled the robotic hand to flexibly respond to dynamic environments and external disturbances, successfully achieving continuous operation in complex tasks.
The NOKOV optical motion capture system provided high-precision human finger motion data and the angular velocity of the robotic hand's grasping object, enabling the robotic hand to adjust finger gaits in real-time and adaptively switch operation modes, thus achieving flexible manipulation of the object.



