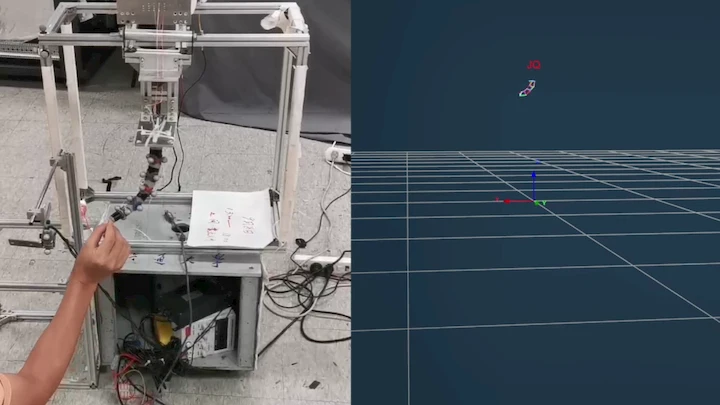
Applications in
Robotic Arms
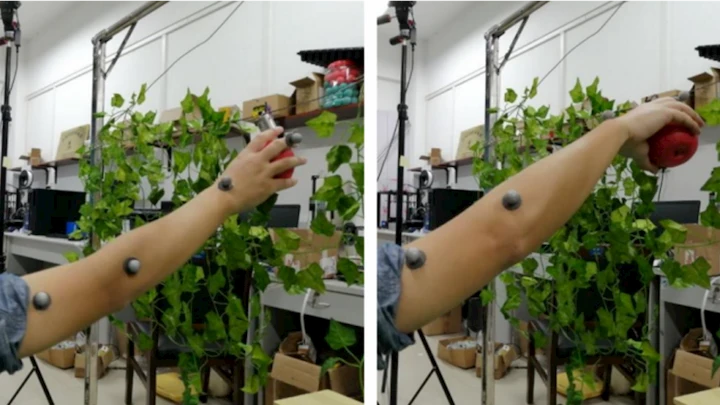
Robotic Arm, End-effectors, Manipulation, Teleoperation,
Human-Robot Interaction/Collaboration, Obstacle/Collision Avoidance,
Control, Localization, Navigation, Perception, Path planning,
Trajectory planning, Vision, Soft Robot, Medical Robot,
Agricultural Robot, Mobile Robot, Human Body