
The research team from the Beijing Institute of Nanoenergy and Nanosystems, Chinese Academy of Sciences, proposed a novel approach for designing wave energy-harvesting triboelectric nanogenerators. This method integrates buoyancy-gravity optimization with conductive 3D printing, enabling substantially enhanced energy harvesting efficiency and operational stability compared to state-of-the-art solutions. The corresponding research article, titled “Buoyancy-gravity optimized triboelectric nanogenerators via conductive 3D printing for robust wave energy harvesting”, was published in the journal Materials Science & Engineering R: Reports (CAS Q1, Impact Factor 31.6).
NOKOV motion capture system was used to record the six-degree-of-freedom (6-DOF) motion of the float models in real time, with a particular focus on pitch angle variation. Using a multi-camera setup, precise motion curves were obtained, providing crucial data for experimental validation.
Citation:
Erming Su, Shuxing Xu, Zhenyu Wang, Zijie Xu, Siyan Pan, Zhong Lin Wang, Leo N.Y. Cao, Buoyancy-gravity optimized triboelectric nanogenerators via conductive 3D printing for robust wave energy harvesting, Materials Science and Engineering: R: Reports, Vol. 164, 2025, 100953. https://doi.org/10.1016/j.mser.2025.100953
Research Background:
With growing global demand for clean energy, ocean wave energy has garnered attention as a renewable resource. However, traditional wave energy harvesting techniques face cost-effectiveness and practicality challenges, especially in low-frequency wave scenarios. TENGs have emerged as a novel solution for wave energy harvesting but suffer from limitations in structural optimization, particularly in terms of external design and theoretical modeling. This research addresses the need for efficient, low-cost TENG-based devices tailored for low-frequency wave energy capture.
Contributions:
1、A Cylindrical Pellet-Based Triboelectric Nanogenerator (CP-TENG) was designed using multi-material and conductive 3D printing to harvest energy from waves, tides, and water body motions.
2、The hydrodynamic model of the float was optimized through simulation and experimentation. Four distinct float models were designed based on the gravity-buoyancy balance principle, with the most efficient one identified.
3、The CP-TENG demonstrated high adaptability, excellent durability, and strong wave energy harvesting capabilities, highlighting its potential for long-term wireless marine condition monitoring.
Device
CP-TENG:Manufactured via multi-material conductive 3D printing, the CP-TENG uses polylactic acid (PLA) filled with carbon fiber (CF) or carbon black to ensure conductivity. Each channel inside the multi-channel structure contains a PTFE cylinder selected through material testing to enhance electrical output. The device is fully enclosed for environmental protection and stability. In field tests, the CP-TENG powered remote sensor nodes, achieved long-distance signal transmission, and displayed outstanding durability in wave environments.
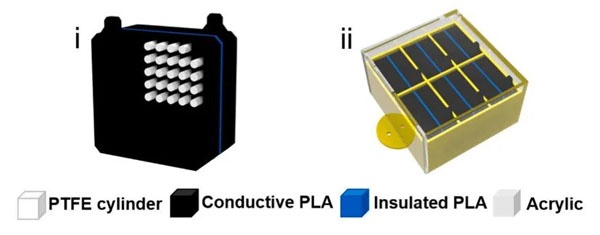
Schematic Diagram of the CP-TENG Device Structure
Float Optimization:The float was designed with an inward-concave profile, improving stability and enhancing pitch amplitude under wave excitation. Four models were evaluated using CFD simulation via ANSYS AQWA and wave tank experiments with NOKOV motion capture. Model 1 emerged as the optimal design, showing the largest pitch angles across different frequencies (47.7° and 64°), significantly outperforming others.
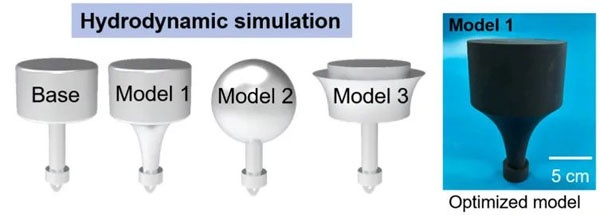
Four Float Models (Left) and Optical Photograph of Model 1 (Right)
Experiment:
To determine the optimal float structure, the study conducted both simulations and physical experiments to analyze and compare the pitch motion curves of four float models (Base Model, Model 1, Model 2, and Model 3) under different wave frequencies. According to the simulation results, Model 1 exhibited pitch angles of 47.7° and 64° under varying wave frequencies, significantly higher than those of the other models, indicating its superior oscillation performance.
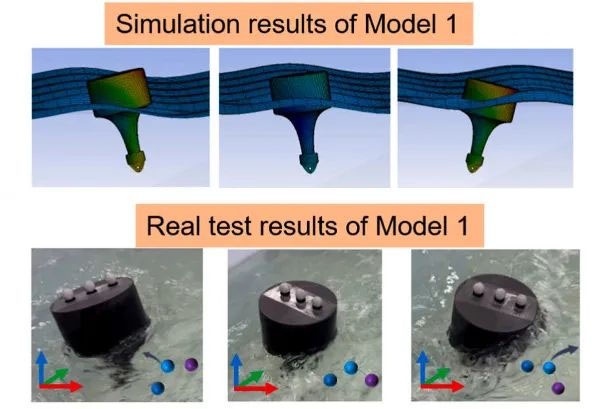
The Hydrostatic Analysis Module of the Computational Fluid Dynamics Software AQWA (Top) and Three Motion States Captured by the NOKOV Motion Capture System (Bottom)
To validate the reliability of the simulation, a series of physical experiments were carried out in an indoor rectangular tank (1.2 m × 1.0 m × 1.0 m, water depth 0.6 m), equipped with a 50-watt wave generator. The float's motion was precisely monitored by the NOKOV optical motion capture system.
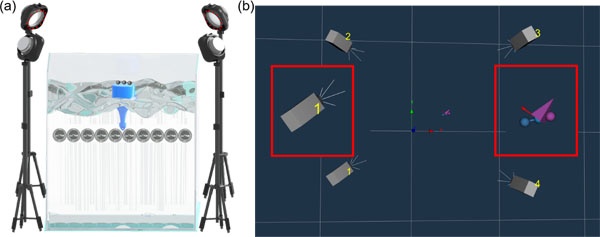
Real-World Experimental Setup (a) and Software Display of the NOKOV Motion Capture System (b)
NOKOV Motion Capture was essential in verifying simulation accuracy for the CP-TENG float models, enabling researchers to confirm the optimal float design and guide final prototype development.
Authors:
Erming Su: PhD candidate at Beijing Institute of Nanoenergy and Nanosystems, CAS; focuses on TENGs, blue energy, and high-precision 3D printing.
Shuxing Xu: PhD candidate at the same institute; focuses on TENGs, blue energy, and self-powered sensing.
Zhenyu Wang: Associate researcher at Institute of Earth Environment, CAS; specializes in TENGs, nanocatalysis, and logistics.
Zijie Xu: Associate researcher at Beijing Institute of Nanoenergy and Nanosystems, CAS; specializes in smart fluid dynamics sensing.
Siyan Pan: PhD student; studies TENG applications in environmental remediation.
Leo N.Y. Cao (Corresponding Author): Associate researcher; focuses on TENGs, blue energy, and 3D printing.
Zhong Lin Wang (Corresponding Author): Professor and Academician; founder of the TENG concept, renowned for contributions in energy nanotechnology.



