In hazardous traffic scenarios, the proactive avoidance behaviors of pedestrians significantly impact the injury risk associated with vehicle-pedestrian collisions. A research team from Tsinghua University has utilized a virtual reality (VR) experimental platform to quantify the interaction process between pedestrians and vehicles in the pre-crash phase, extracting pedestrian postures immediately before a collision—termed "pre-crash postures." This study, titled "Kinetic and Kinematic Features of Pedestrian Avoidance Behavior in Motor Vehicle Conflicts," has been published in the journal Frontiers in Bioengineering and Biotechnology and is indexed by SCI and EI.
The study employed NOKOV motion capture system and physiological signal systems to record the kinetic and kinematic features of pedestrian avoidance responses. This data provides crucial support for analyzing pedestrian injury risks, developing biofidelic human body models (HBM), and designing advanced in-vehicle active safety systems.
Citation
Li Q, Shang S, Pei X, Wang Q, Zhou Q, and Nie B (2021) Kinetic and Kinematic Features of Pedestrian Avoidance Behavior in Motor Vehicle Conflicts. Front. Bioeng. Biotechnol. 9:783003. doi: 10.3389/fbioe.2021.783003
Methods
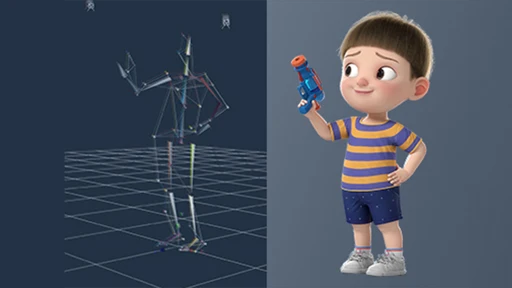
The research team developed a natural pedestrian response experimental platform comprising three modules: a virtual reality (VR) testing platform, NOKOV motion capture system, and an electromyogram (EMG) signal capture system. The VR testing platform generated a highly realistic immersive VR traffic scenario, allowing subjects to have normal peripheral auditory functions, distance perception, and interaction capabilities within the virtual traffic environment. Participants performed road-crossing actions in the VR traffic scene. To simulate typical real-world pedestrian-vehicle conflict scenarios, the experimenters created two emergency vehicle-pedestrian conflict situations immediately after the subjects entered the road to elicit natural responses.
Feature Extraction of Pedestrian Avoidance Behavior
The experiment used NOKOV motion capture system to extract dynamic relative positions between pedestrians and vehicles during interaction. Using 12 Mars 2H motion capture cameras, the system recorded the pedestrians movement speed and acceleration, joint positions, and angle data. Additionally, the physiological signal system recorded electromyogram (EMG) signals from the lower limb muscles to measure muscle activation states and capture pelvic motion characteristics.
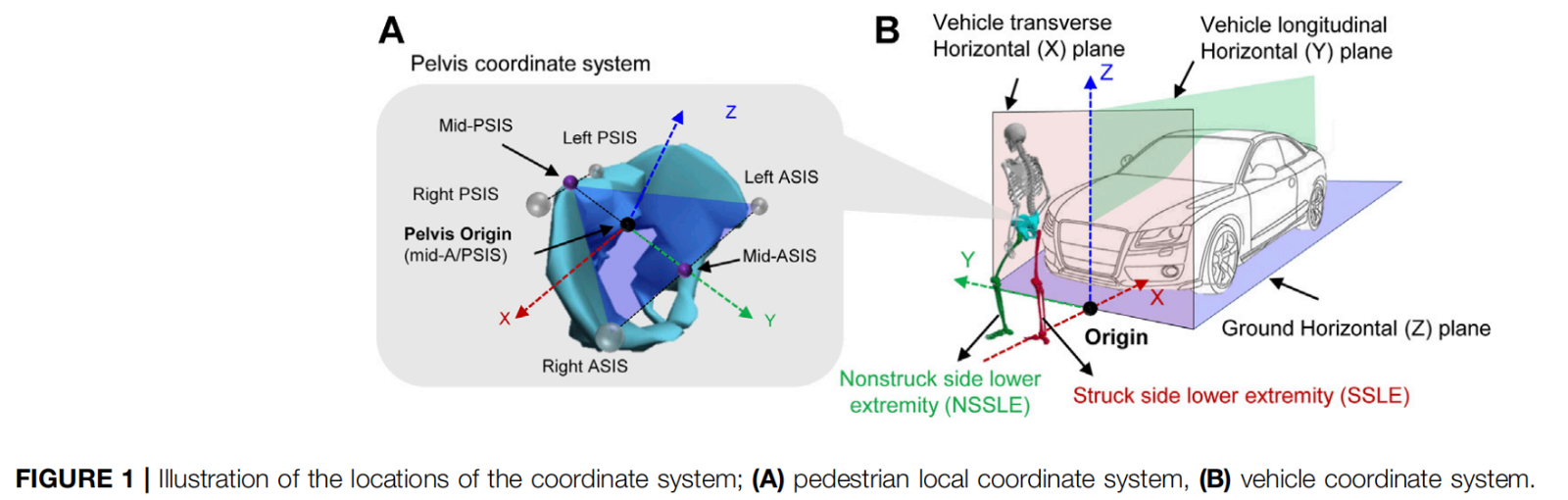
Coordinate System Illustration (A) Pedestrian Local Coordinate System (B) Vehicle Coordinate System
Representative Reaction Categories in Vehicle-Pedestrian Conflicts
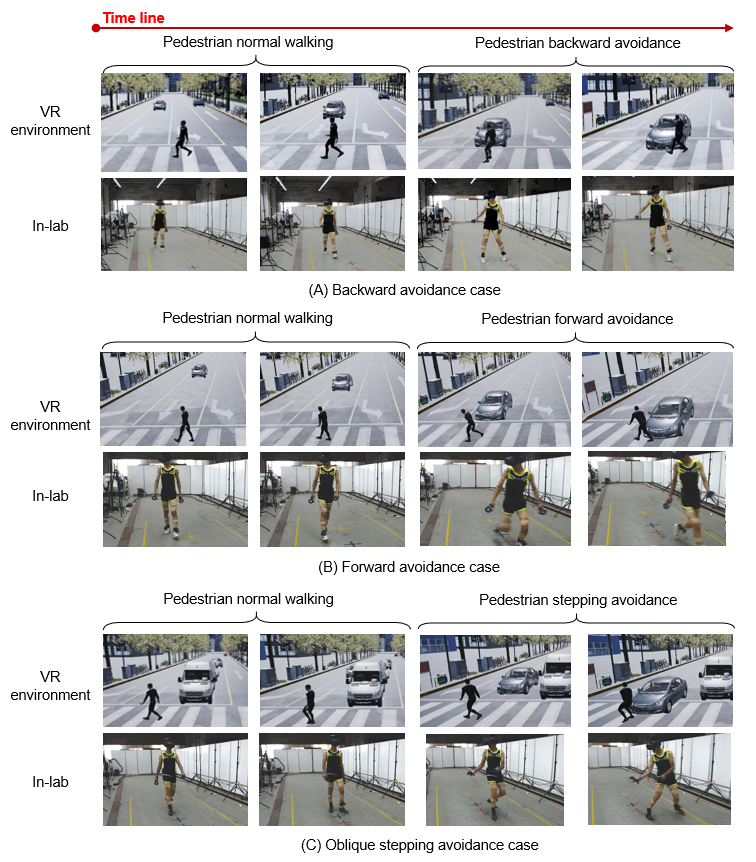
The research team selected three representative avoidance behavior categories: backward avoidance, forward avoidance, and sidestep avoidance, analyzing the interaction process between vehicles and pedestrians in detail.
Contributions of this Study
This research offers a novel perspective for assessing collision risks from the pedestrians viewpoint, making two significant contributions to subsequent collision risk prediction studies:
1. It quantifies the interaction process between pedestrians and vehicles in the pre-crash phase and extracts pedestrian postures immediately before a collision, known as " pre-crash postures."
2. When examining the impact of avoidance behaviors on injury risk and severity, the experimental data from this study serves as a valuable reference for developing finite element (FE) and multi-body (MB) human models and simulating pedestrian injury risks during collisions.
NOKOV motion capture system acquires kinetic and kinematic data on pedestrian avoidance responses in vehicle conflicts, including joint angles, movement speed, and acceleration. This information can be used to analyze pedestrian injury mechanisms using high-precision human numerical models. Furthermore, it can elucidate pedestrian injury characteristics in real accidents and provide data for predicting pedestrian trajectories and injury risks.