The research team led by Prof. Ning Tan at Sun Yat-sen University has published a study on a behavior-predefined adaptive control (BPAC) framework for continuum robots in The International Journal of Robotics Research (IJRR). The NOKOV motion capture system provides high-precision end-effector position data for experiments, supporting the validation of the proposed control method's effectiveness.
The research team led by Prof. Ning Tan at Sun Yat-sen University proposed a behavior-predefined adaptive control (BPAC) framework for heterogeneous continuum robots(HCRs). The related research paper “Behavior-predefined adaptive control for heterogeneous continuum robots” has been published in The International Journal of Robotics Research, a top-tier journal in the field of robotics.
The NOKOV motion capture system provides high-precision position data for the study, validating the accuracy of the checkerboard and a vision-based method in tracking the end-effector position of continuum robots.
Citation
Tan, Ning, et al. "Behavior-predefined adaptive control for heterogeneous continuum robots." The International Journal of Robotics Research 44.1 (2025): 65-95.
Research Background
Research on the control of continuum robots is in a developing stage, with many challenges to be solved. This paper focuses on the following two core issues.First previous control methods struggle to achieve desired task-space performance. Secondly, the diversity of heterogeneous continuum robots poses great challenges to the development of a generic control system.
The main Contributions
1. Combining Prescribed Performance Control(PPC) and the zeroing dynamics, a controller is designed to achieve the kinematic motion control and visual servoing for continuum robots. This is the first systematic investigation of its task-space PPC, achieving prescribed performance metrics without parameter fine-tuning.
2. Based on the zeroing dynamics method, the robot's velocity-level kinematic model is estimated. The controller and estimator are integrated to form an adaptive control system. This system requires only simple initialization and online adaptation to quickly adapt to different types of HCRs.
3. The method's feasibility, effectiveness, and robustness were validated on five types of HCRs, promoting research on generic control of HCRs at the application level.
Method
The research proposes a behavior-predefined adaptive control (BPAC) framework aimed at achieving task-space kinematic control and visual servoing for HCRs. The core of the method consists of three parts:
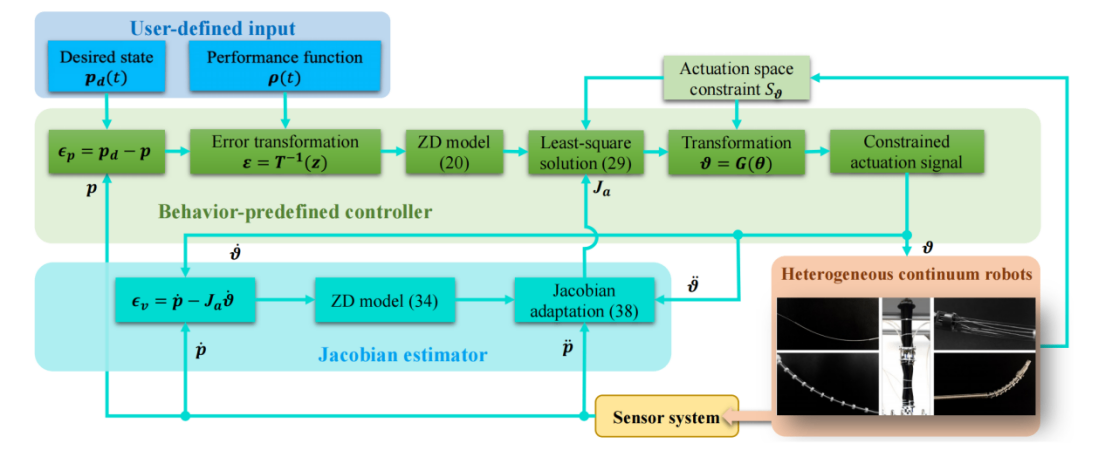
Diagram of the proposed behavior-predefined adaptive control (BPAC) system for heterogeneous continuum robots.
1. Behavior-Predefined Controller: Through error transformation and actuation-space transformation, users are able to prescribe transient error, steady-state error, and convergence time. When the actuation-space DoF are redundant, actuation-space limits are avoided to ensure successful completion of end-effector tasks.
2. Jacobian estimator: An online adaption law based on zeroing dynamics is employed to estimate the robot Jacobian matrix in real time. This estimator does not rely on analytical models or kinematic parameters and is a key component for achieving generic control across heterogeneous setups.
3. Improving convergence and robustness: To address the issue that traditional performance functions may lead to controller failure when errors exceed prescribed boundaries under external disturbances, a re-adjustable performance function (RePF) is proposed. This function dynamically adjusts performance boundaries, significantly improving system robustness.
Simulations
The effectiveness of the proposed control method is verified through simulations on the cable-driven continuum robot (CCR) and the concentric-tube continuum robot (CTR ). The results demonstrate that the system achieves prescribed performance control, ensuring the transient error and steady error in the task space performance, while satisfying the actuation-space constraints. Under disturbances, the system maintains stability by the RePF. The proposed method outperforms traditional methods in terms of accuracy and robustness, further validating the reliability of the model-free adaptive methods.
Experiments
To validate the proposed BPAC method on real-world systems, physical experiments were conducted on five HCRs:
Cable-Driven Continuum Robot: The robot performs the pentagram path tracking task and point-to-point tasks in the presence of obstacle. Experimental results show that the end-effector position error converges to less than 2 mm within the prescribed time. In the presence of unknown additional loads, the boundaries specified by the RePF are re-adjusted to keep the task-space errors within the boundaries.
The NOKOV motion capture system was used as the measurement benchmark, and cross-validation shows that the actual end-effector path measured by the Micron Tracker is highly consistent with the high-precision trajectory recorded by NOKOV, with an average error of only 1.2 mm, setting a reliable standard for the accuracy achieved by the controller.
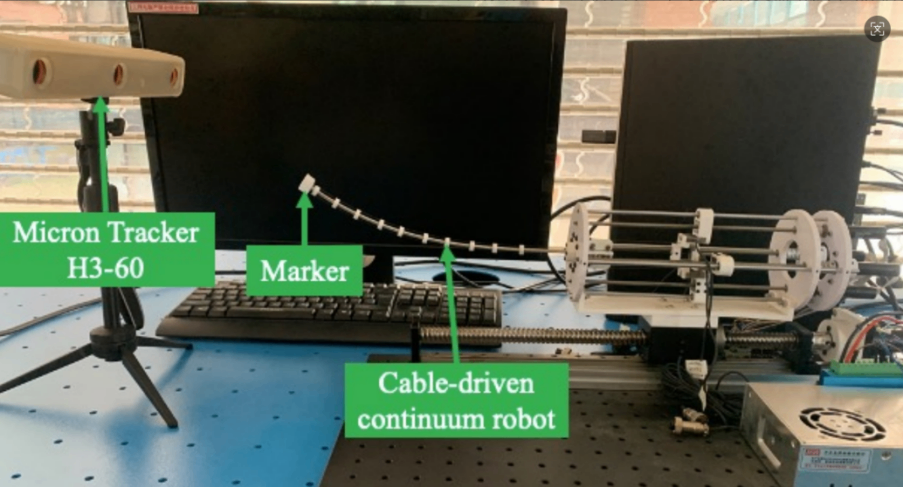
Experiment platform of the cable-driven continuum robot.
Experiment results ofthe CCR tracking the pentagram path.
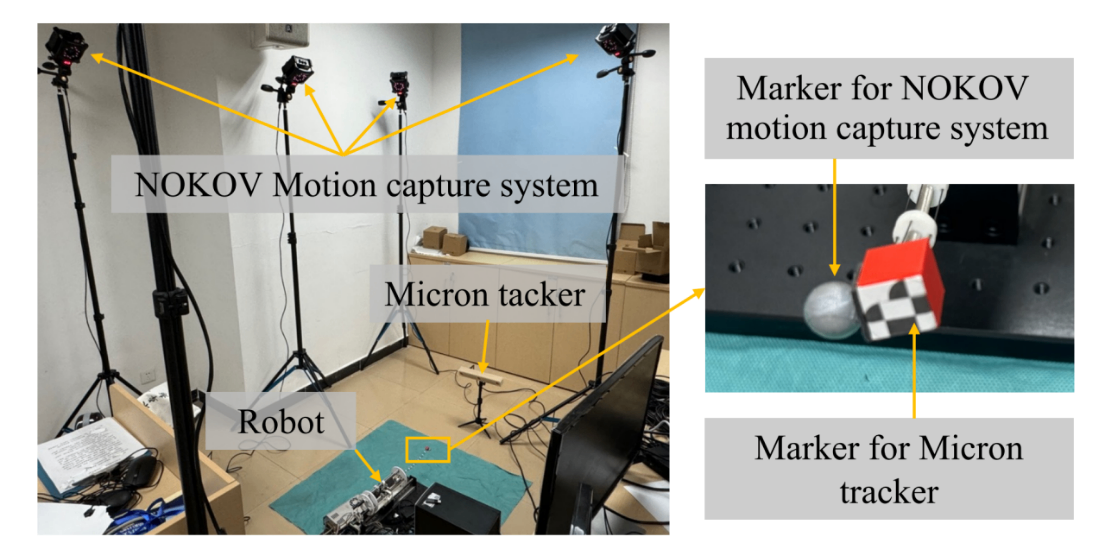
Experiment setup for validating the accuracy of the Micron Tracker H3-60.
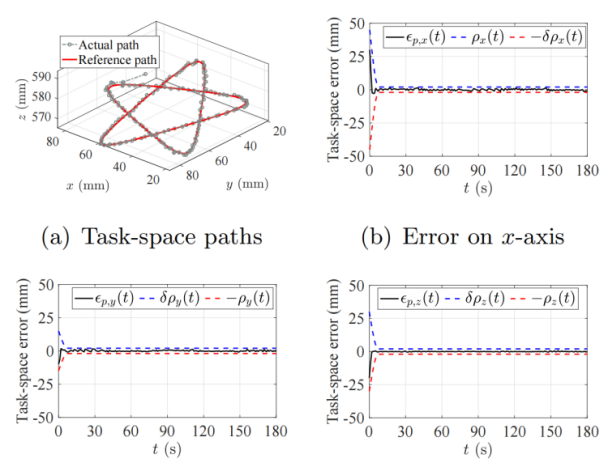
Parallel Continuum Robot: The robot is controlled to complete point-to-point positioning and circular path tracking. The task-space error is always constrained within the prescribed performance boundaries of less than 1.5 mm.
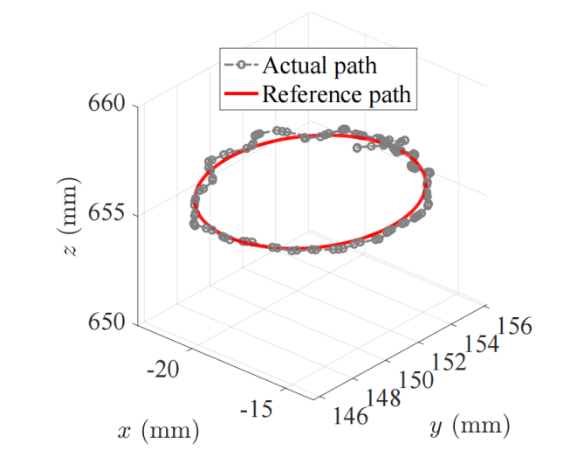
Profiles of the reference path and actual path of PCR when performing the circular path tracking task.
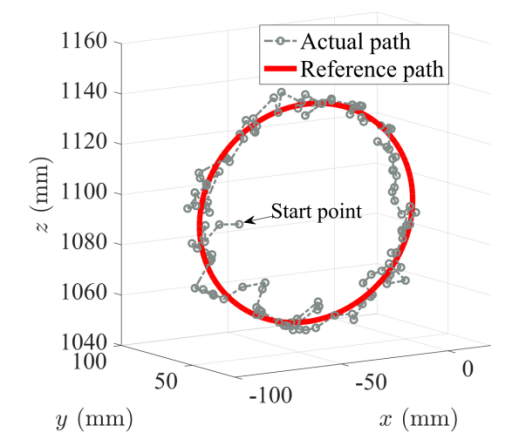
Concentric-Tube Robot: The robot is controlled to track a 3D space curve. The robot successfully completes the tracking task with errors within the boundary constraints. Furthermore, the boundaries specified by the RePF are re-adjusted to keep the task-space error within the boundaries when suffering from disturbances and the error still converges to zero after the disturbances.

Profiles of the reference path and actual path of CTR when performing the tracking task.
Flexible Endoscope: Visual servoing experiments are conducted to validate the proposed BPAC method. The target region is determined by a laser point, and the desired image feature is successfully achieved. Even under external disturbances, the visual servoing task is completed successfully.
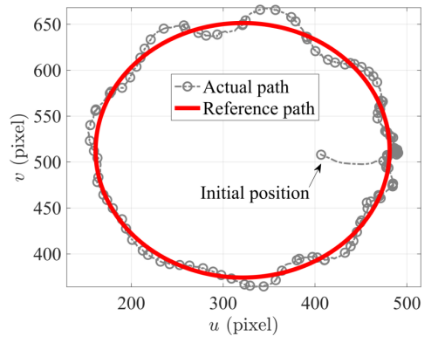
Profiles of the reference path and actual path of the endoscope in the image plane when performing the laser-guided visual servoing tracking task.
Pneumatic Continuum Robot: Despite inherent jitter in the prototype, stable trajectory tracking and disturbance-resistant point-to-point control are achieved. The RePF effectively accommodates the effects of unmodeled dynamics and external disturbances.
Profiles of the reference path and actual path of the PneumCR when performing the tracking task.
The experiments fully demonstrate the versatility, precision, and robustness of the BPAC framework on different continuum robot structures and drive mechanisms.
Simulation and Physical Experiment Demonstration Video
NOKOV motion capture system provided the trajectory data with sub-millimeter precision, which was used to analyze errors and validate the accuracy of the visual system in the experiments.
Ning Tan (Corresponding Author), Associate Professor, School of Computer Science and Engineering, Sun Yat-sen University. His main research areas include intelligent robotics, intelligent control, medical robotics, multi-robot cooperation, biomimetic robotics, and artificial intelligence.
Peng Yu, PhD student, School of Computer Science and Engineering, Sun Yat-sen University. His main research areas include flexible continuum robots and intelligent control.
Xin Wang, PhD student, School of Computer Science and Engineering, Sun Yat-sen University. His main research areas include medical robot control.
Kai Huang, Professor, School of Computer Science and Engineering, Sun Yat-sen University. His main research areas include the basic theories of embedded/CPS systems and their industrial applications.