Artificial muscle is an actuator that generates power through deformation. Its development can greatly accelerate the technological process of research on robots and artificial limbs. It has a wide range of application scenarios. At present, there are many artificial muscles that generate force based on different principles.

The expandable structure in which the shape is changed by folding and unfolding can be applied to a variety of scenarios. This structure naturally has the ability to fold and unfold. The famous origami structure is a typical unfoldable structure, and different functions can be realized by folding deformation.
For future development, there is a problem with this structure: how to make this expandable structure suitable for paperless mass production. Recent studies on paper origami structures have shown that even in the absence of external loads, the cardboard is prone to buckling during deformation when actuated with origami structures. This requires the use of thick cardboard for added stiffness. It is very difficult to directly print thick cardboard with complex origami/kirigami expandable structures.
To solve this problem, researchers from Shantou University proposed a puzzle-like way to connect thick nylon sheets and use shape memory alloy (SMA) drives to unfold the artificial muscle structure. This structure is actuated in response to temperature changes, generating pull and push forces, and by making geometric adjustments, changing the arrangement of multiple units (series-parallel or changing the way SMAs are inserted), an encodable force response can be produced.

The structure consists of two basic units, a square with side length n and a parallelogram with side lengths n and m and angle α, which are connected by hinges, and a nickel-titanium SMA sheet is inserted in the middle for driving.
In the experiment, there are four reflective markers attached to the points A, D, E, and E' of the structure. Six NOKOV motion capture cameras are used to track the real-time spatial position of each marker, and the distance AD and angle ∠EDE' under different conditions are calculated at the same time, and compare the model analysis results with the measured results of the motion capture system. The measurement accuracy of the NOKOV motion capture system is extremely high, the coordinate accuracy can reach sub-millimeter level, and the angle measurement accuracy can reach 0.1°, which can accurately obtain the state data of the kirigami structure during the deformation process.

The experimental results show that the kirigami structure exhibits the expected deformation when the temperature is changed, and the measured distance AD and angle ∠EDE' results are in good agreement with the analytical geometric model. According to the measurement data, the variation range of the distance AD and the angle ∠EDE' increases with the increase of α.

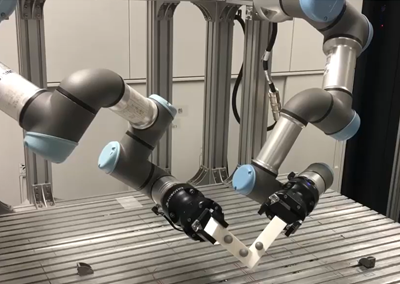
In addition, the researchers also used this artificial muscle structure to make a robotic arm, which was fixed a 10g load at the end, and heated the structure to contract/extend to lift the load, and tested the pulling force and pushing force of the structure, respectively.
Bibliography: