The latest selected paper for ICRA 2024, proposed by the team of Professor Meng Qinghu from Southern University of Science and Technology, presents an efficient trajectory planning method for continuum robots based on RRT*. The efficiency and safety of this method were validated through real-world experiments using the NOKOV motion capture system.
Recently, there has been increased attention on continuum robots. With high flexibility, they can adjust their shape to adapt to dynamic environments, making them suitable for a variety of applications including minimally invasive surgery, industrial production, and exploration in hazardous environments.
Continuum robots have infinite degrees of freedom (DoF), which provides flexibility and adaptability for tasks such as spatial exploration. However, with increasing degrees of freedom, the complexity of the continuum robot also increases. This causes continuum robots to require significant time for motion planning during task execution, which poses obstacles to their practical applications.
The team led by Professor Meng Qinghu from the Southern University of Science and Technology conducted in-depth research and proposed a unique motion control method based on RRT* specifically tailored for continuous robots.
The related research paper was selected for ICRA 2024 and will be presented at the ICRA 2024 conference.

Application of RRT*-based motion control in continuum robots
Motion planning algorithms are essential for robot navigation, requiring consideration of map information, environmental features, speed limits, and dynamic obstacles.
Predictive motion planning algorithms consider the robot's current state and use sensor data and environmental models to predict changes in its surroundings, aiming to achieve specific goals such as collision avoidance, reducing travel time, and saving energy.
Predictive motion planning algorithms often incorporate sampling-based algorithms, such as Rapidly exploring Random Tree (RRT), and its advanced version RRT*.
These algorithms are known for their simplicity, adaptability, and ability to handle dynamic changes. They are widely used in various fields such as robotics, autonomous vehicles, and industrial automation, improving safety and efficiency in complex environments.

A two-stage continuum robot
Although sampling-based methods like RRT* and PRM have been widely used in robot motion planning, there have been few attempts to apply them to continuum robotic arms.
Continuum robots can adapt to obstacles in real time. Because of this, strong perception, decision-making, and control capabilities are required to ensure safe and efficient navigation.
To address this challenge, this study proposes a unique RRT*-based motion control method tailored to continuum robots.
This method utilizes an optimization-Jacobian-based method to achieve robust control of the robot. By constraining the robot's Jacobian matrix, it ensures a safe distance between the robot and nearby obstacles for an effective geometric obstacle avoidance scheme.
Additionally, a control algorithm that combines the optimization-Jacobian-based approach with an RRT* algorithm is proposed to enhance the adaptability and efficiency of continuum robots in dynamic environments.
Experimental validation

A collision-free path for the robot from the start to the end point
The effectiveness of the proposed method is verified using a two-segment cable-driven soft robot (CDSR).
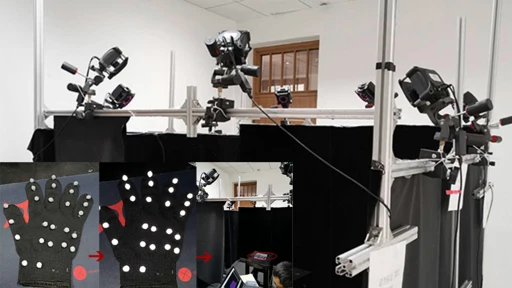
In the experiment, the NOKOV motion capture camera is used to track the positions of the robot's base, the base of the proximal segment, and the tip of the distal segment. Additionally, the motion capture system recorded the position and relative motion of the robot navigating along a predefined path.
The recorded data reveals the differences between the actual and predicted positions of the robot, providing a basis for understanding the robot's configuration.
With the proposed algorithm, the robot can rapidly compute collision-free trajectories from the initial position to the target position and successfully navigate around obstacles.
The average planning time is approximately 8.06 seconds, and the tip tracking error between the planned and actual arrival positions is about 5.48 millimeters.
This method ensures the generation of safe and fast response trajectories, demonstrating robustness in challenging scenarios and holding practical value for real-world applications.
Bibliography: