Agriculture has always been the cornerstone of the brilliant civilization of mankind, and at the same time, it has been developing along with modern civilization. Today, with the continuous development of science and technology, agriculture has entered a new stage, with the continuous influx of high-tech and picking robots as one of them.
In the process of fruit and vegetable production, picking is the most time-consuming and labor-intensive link, and the cost of manual picking accounts for about 50%~70% of the total production cost. Therefore, it is necessary to study the picking robot. It can not only solve the problem of labor shortage in China, but also promote the progress of agricultural science and technology in China.

There are three technical problems in the design of picking robot.
First, how to navigate the picking robot to move quickly among fruit trees; The second is how to quickly identify and locate fruits on fruit trees; The third is how to harvest the identified fruits without damage. These three technical problems can be transformed into object positioning, unmanned ground vehicle control and robotic arm motion control. Because the skin of fruit is fragile and soft, improper picking will damage the surface of fruit, resulting in losses in subsequent storage and transportation. Therefore, the precise position control of the end effector of the robotic arm is particularly important for the robotic arm to grasp the fruit stably.

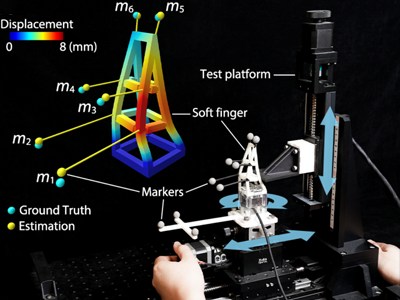
The picking robot R&D team of Teacher Yang Changhui's Laboratory of Chongqing University of Science and Technology used NOKOV optical dynamic capture technology in the R&D process. Six Mar2h cameras were set up in the laboratory. First, the accurate position coordinates of the unmanned ground vehicle were obtained by pasting Markers on the bottom of the picking robot arm. These position coordinates were used as feedback signals of the control system to correct the traveling position and other information of the unmanned ground vehicle, thus realizing accurate control of the unmanned ground vehicle. Then, the robot arm and fruit are pasted to capture the coordinate information of the points on the robot arm during the interaction between the robot arm and the fruit. After post-processing, the information such as the motion and posture of the robot arm, especially the coordinates and posture of the end effector of the robot arm, is compared with the information of the points on the fruit, and the data will be brought into a systematic error evaluation model and a random error evaluation model for calculating the positioning error of the robot arm and analyzing the data. In the presence of random errors, the appropriate amplitude and phase angle of the terminal configuration are determined according to the data, so as to achieve the goal of picking fruits without injury.

In addition, the picking robot R&D team of Northwest A&F University and other universities also used NOKOV optical dynamic capture technology in the experiment.