At ICRA 2025, Prof. Yu Guo’s team from Nanjing University of Science and Technology presented the paper “Command Filtered Cartesian Impedance Control for Tendon Driven Continuum Manipulators with Actuator Fault Compensation.” This work proposes a novel scheme that fused impedance control with fault-tolerant control, addressing two major challenges for tendon-driven continuum manipulators (TDCMs) in complex environments:
1. High-precision Trajectory Tracking and Compliant Force Control
To achieve this, the paper introduces a finite-time Cartesian impedance control framework. The method uses a second-order low-pass filter to dynamically replan the reference trajectory based on real-time contact force at the robot tip. A finite-time command filtered backstepping controller is then designed, and finite-time convergence is rigorously proven via a Lyapunov-based analysis. This ensures both accurate trajectory tracking and compliant interaction with the environment.
2. Performance Degradation Caused by Actuator Failures
Addressing the tendon antagonism and actuator lag, which may lead to partial actuator failure, the authors construct a fault model informed by tendon tension sensors. A fault-compensated tendon tension control algorithm is proposed, which dynamically adjusts the tendon tensions in real time. This significantly enhances the system’s reliability and robustness, enabling stable operation even under actuator faults.
Real-world Experiment
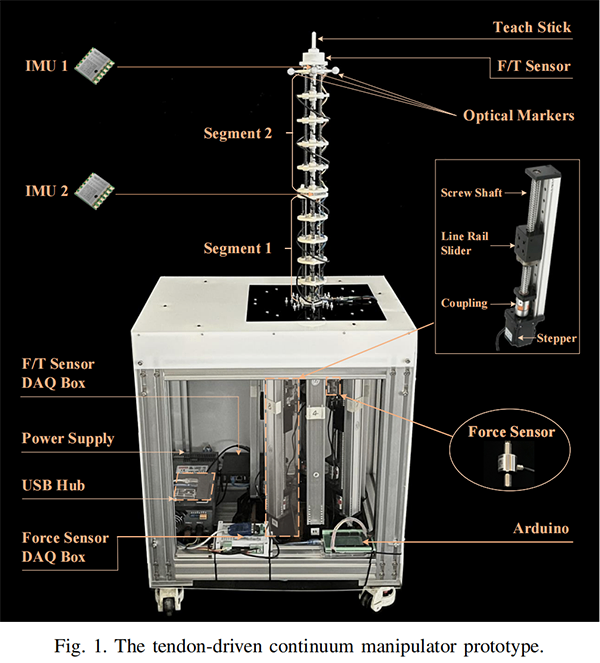
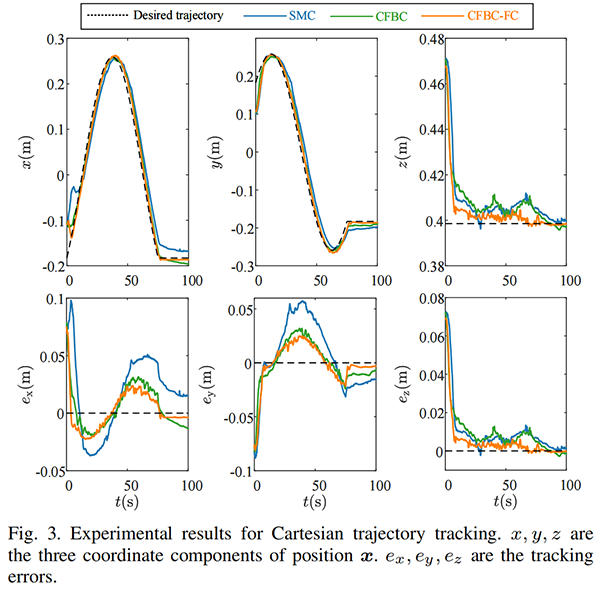
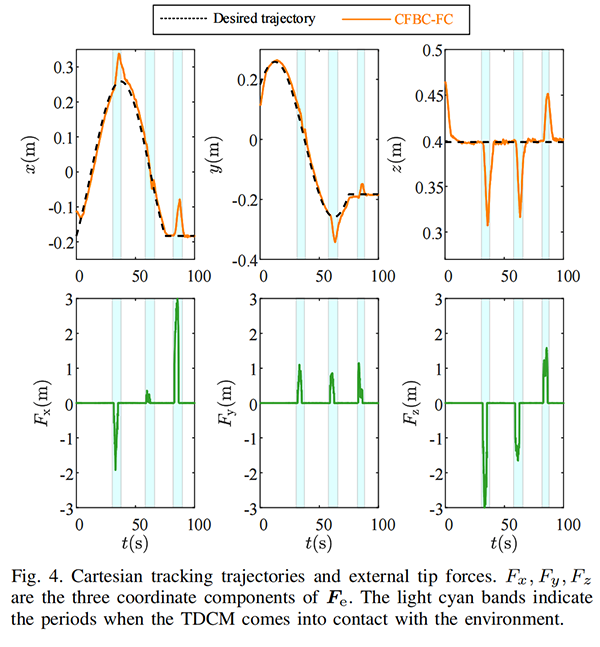
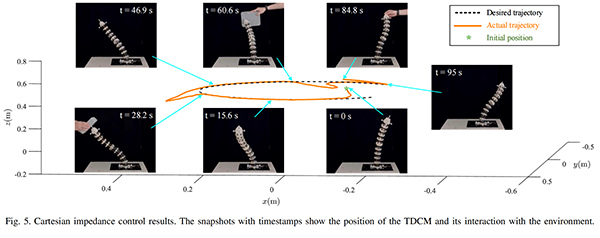
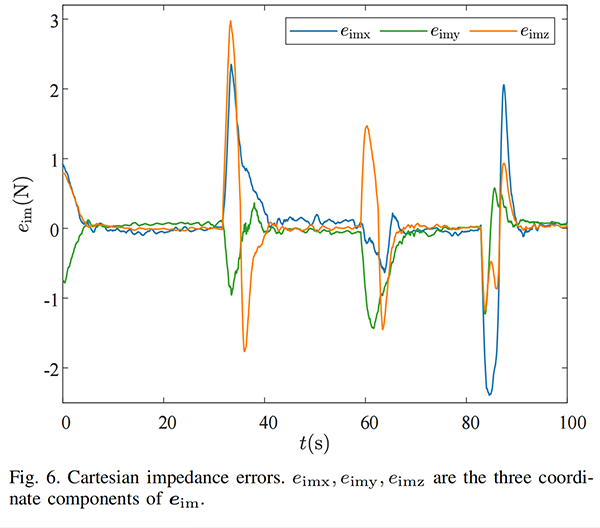
Experiments were conducted on a two-segment TDCM prototype (Fig. 1). The results validate the effectiveness of the proposed control scheme. Specifically, the system achieved a trajectory tracking accuracy of 0.005 meters, representing over a 50% improvement compared to the baseline methods (Fig. 3). When interacting with obstacles, the impedance error remained within 0.09 N, and the manipulator quickly resumed trajectory tracking after disengagement (Fig. 4). These outcomes demonstrate the combined control approach’s ability to achieve both precise tracking and compliant interaction, while greatly improving system robustness.
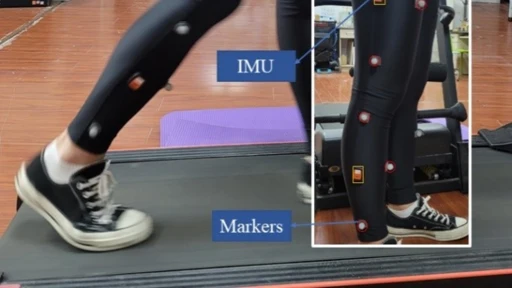
NOKOV motion capture system provided high-fidelity real-time pose data of the actuator (Fig. 5), supporting the validation of both the impedance and fault-tolerant control strategies.
Author Information
Xianjie Zheng, Ph.D. candidate, School of Automation, Nanjing University of Science and Technology. Research focus: modeling and control of continuum robots.
Zhaobao Yu, Ph.D. candidate, School of Automation. Research focus: compliant control and intelligent robot control.
Meng Ding, Ph.D., School of Automation. Research focus: modeling and control of continuum robots.
Liaoxue Liu, Associate Professor, School of Automation. Research focus: space robotics and continuum robot control.
Jian Guo, Professor and doctoral advisor, School of Automation. Research focus: intelligent and robotic control.
Yu Guo, Professor and doctoral advisor, School of Automation. Research focus: intelligent robotic control and spacecraft attitude control.