A research team from Beihang University has proposed an optimization-based safe trajectory and formation size online planning algorithm. The related research paper titled "Time-Varying Formation Planning and Distributed Control for Multiple UAVs in Clutter Environment" has been published in IEEE Transactions on Industrial Electronics.
NOKOV motion capture system provides positioning and environmental obstacle perception data for the leader UAV by capturing the positions of reflective markers on the UAVs, enabling online trajectory planning and formation control.
Citation Format
Ze, K., Wang, W., Liu, K., & Lü, J. (2023). Time-Varying Formation Planning and Distributed Control for Multiple UAVs in Clutter Environment. IEEE Transactions on Industrial Electronics. https://doi.org/10.1109/TIE.2023.3335448
Research Background
Traditional multi-UAV formation control methods predominantly employ centralized architectures, where the leader UAV acquires global information before transmitting reference signals to each follower UAV. This approach demands substantial communication resources and exhibits poor system robustness. In contrast, distributed formation control has emerged as a research focus in recent years. Current domestic and international studies on multi-UAV formation control in complex cluttered environments remain limited, hindering widespread application. To address these technical limitations, the Beihang University research team has developed an online planning-based UAV formation control method.
Key Contributions
1. A novel online planning algorithm for formation center trajectory and formation size is proposed, simultaneously enhancing trajectory smoothness and formation control safety.
2. Based on a complete nonlinear dynamic model of UAVs, a distributed formation control method is developed that solves real-time obstacle avoidance challenges in complex environments while reducing communication burden and improving practical applicability.
3. A smooth distributed reference signal observer is introduced, eliminating the use of sign functions present in existing observers and mitigating control instability caused by observer chattering.
Experimental Procedure
Experiments were conducted in an indoor environment where the NOKOV motion capture system provided UAV positioning. The leader UAV's planning and control behaviors were simulated via computer threads, while follower UAVs' distributed observer nodes and control nodes operated on an upper computer. The distributed communication network was simulated using ROS, with communication between the upper computer and UAVs established via Crazyradio.
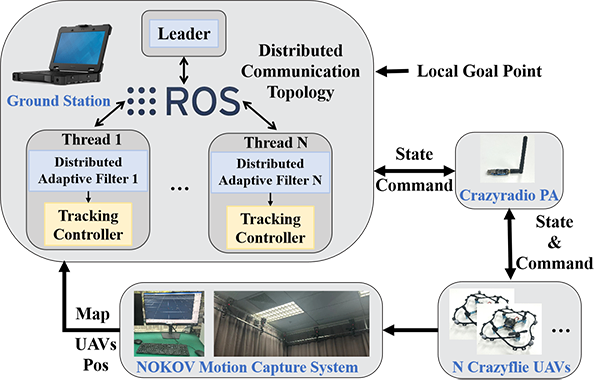
Diagram of the experimental system
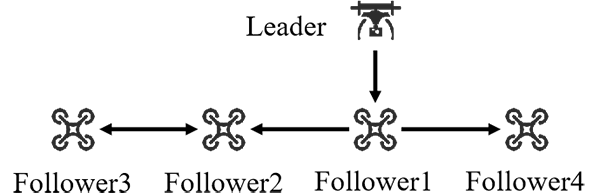
Communication topology
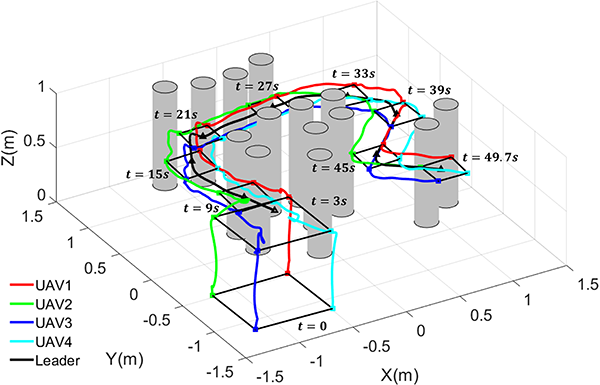
Trajectory of follower UAVs in real world
The test environment (3×3×3 m³) contained multiple obstacles with both local and global target points.
Results demonstrated successful obstacle avoidance while maintaining polygonal formations, with formation tracking errors converging near zero. Stable control inputs (thrust and torque) verified the smoothness and real-time performance of trajectory planning, along with the effectiveness of distributed control.
NOKOV motion capture system supplied precise positioning data for the leader UAV, enabling it to acquire both its position and environmental obstacle information. This ensured successful formation maintenance while avoiding collisions with obstacles.