
On April 16th, the top journal in robotics, Science Robotics, officially published a research paper titled “Unlocking Aerobatic Potential of Quadcopters: Autonomous Freestyle Flight Generation and Execution” by Professor Gao Fei team from the School of Control Science and Engineering at Zhejiang University. The first author of the paper is Wang Mingyang.
The complete system proposed in this paper enables drones to generate and execute complex aerobatic maneuvers in complex environments with dense obstacles. The performance of these aerobatic maneuvers can match that of professional human pilots without manual operation.
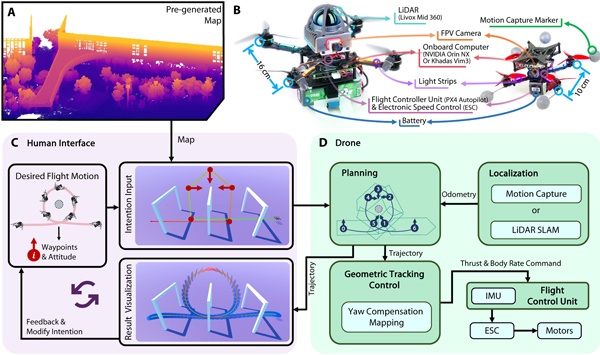
NOKOV Motion Capture System provided high-precision, real-time data on the position and attitude of the drones, which helped validate the drone flight performance when executing complex aerobatic maneuvers in confined spaces.
Citation
Mingyang Wang et al. Unlocking aerobatic potential of quadcopters: Autonomous freestyle flight generation and execution. Sci. Robot. 10, eadp9905(2025). DOI: 10.1126/scirobotics.adp9905
Research Background
In 2023, Song et al. [1] and Kaufmann et al. [2] described the use of reinforcement learning and model predictive control in high-speed drone racing, outperforming champion pilots. However, this type of racing maneuver only considers the outcome and lacks the capability to respond to required arbitrary attitude changes, which are the primary difficulty of aerobatic flight.
Generating diverse aerobatic maneuvers based on human intention remains an unsolved core objective in aerobatic flight. Furthermore, existing techniques struggle with object avoidance and are thus limited to flying in open, obstacle-free environments. Thus, in more complex scenarios, these conventional strategies cannot ensure the generation of dynamically feasible trajectories.
To address these challenges, Professor Gao Fei team conducted relevant research to enable drones to autonomously generate and smoothly execute complex and continuous aerobatic maneuvers in complex environments.
Key Contributions
1.Instruction: This study proposes a universal representation of aerobatic trajectories that succinctly represents the flight process as a series of discrete aerobatic intentions. These intentions, which include changes in topological structure and orientation, can be combined in various ways to express complex flight maneuvers.
2.Planning: This paper also designs a spatial- temporal joint optimization trajectory planner to generate dynamically feasible, smooth, and collision-free flight trajectories.
3.Control: In response to the yaw sensitivity issues in aerobatic flight and identify the inherent influence of differential flatness singularities on yaw rotations while avoiding associated dynamics issues.
Experiments
1. Large-scale aerobatic flight
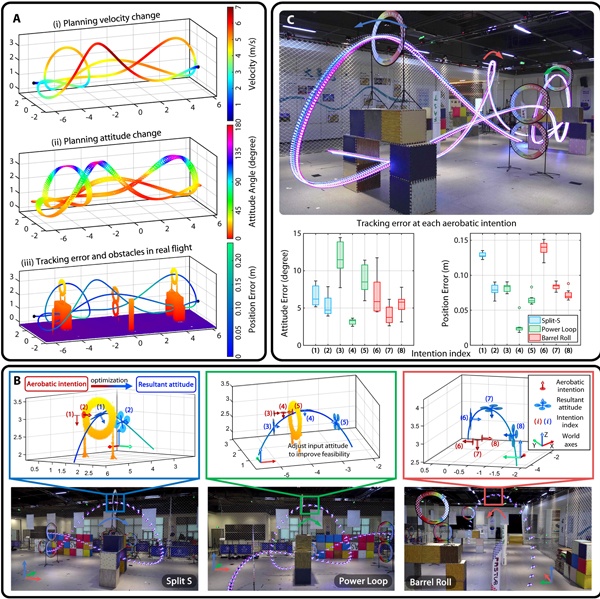
The research team conducted aerobatic flight experiments in a large-scale unstructured environment. The system generated flight trajectories based on aerobatic intentions and could strictly constrained the net thrust and angular velocity to remain within the generous upper limits of the dynamic parameters, ensuring that the drone could easily execute aerobatic maneuvers. This validated the drone autonomous aerobatic flight capability in large-scale unstructured environments.
Video of Large- scale aerobatic flight in an unconstrained environment
2. Successive aerobatic maneuvers in confined spaces
The Successive aerobatic maneuvers experiments were conducted in a confined space with a height of only 3.5 meters to verify the system ability to generate and execute aerobatic flight trajectories in narrow spaces, especially near obstacles. Based on a series of aerobatic intentions input by the user, including general position and attitude, the system utilized a spatial- temporal joint optimization trajectory to generate agile aerobatic flight trajectories that avoided obstacles.
Video of successive aerobatic maneuvers in confined spaces, with real-time attitude and position data of the drone provided by NOKOV Motion Capture System.
During the experiments, NOKOV Motion Capture System was used to obtain the aerobatic flight trajectories and attitude information of the drone, including maneuvers such as flying backward through a circular door and frequently traversing tunnels. The experimental results showed that even when the spacing of users input intentions was too close, the system was still able to automatically adjust and generate dynamically feasible trajectories to successfully complete the aerobatic flight tasks in confined spaces.
Performing aerobatics while avoiding obstacles,with real-time attitude and position data of the drone provided by NOKOV Motion Capture System.
3. Matching and surpassing human pilots
The autonomous system proposed in this paper was compared with a professional human pilot with five years of flying experience. The experimental results showed that the system achieved a 100% success rate in executing both single power loop maneuvers and multiple consecutive power loop tasks, outperforming the professional pilot. This validated the system performance and stability in executing complex aerobatic maneuvers, especially in terms of success rate and trajectory optimization when performing multiple consecutive aerobatic maneuvers.

Statistics describing the success rate for continuous power loops
NOKOV Motion Capture System provided high-precision, real-time data on the position and attitude of the drones, which helped validate the drone flight performance when executing complex aerobatic maneuvers in confined spaces.
Statistics describing the success rate for continuous power loops
References
[1] Y. Song, A. Romero, M., V., D. Müller, Koltun, Scaramuzza, Reaching the limit in autonomous racing: Optimal control versus reinforcement learning. Sci. Robot. 8, eadg1462 (2023).
[2] E. Kaufmann, L. Bauersfeld, A. Loquercio, M., V., D. Müller, Koltun, Scaramuzza, Champion-level drone racing using deep reinforcement learning. Nature 620, 982–987 (2023).
Authors
Wang Mingyang: Ph.D. candidate at the School of Control Science and Engineering, Zhejiang University, and a member of Zhejiang University Huzhou Research Institute. Research interests: Motion Planning; Drone Aerobatics
Wang Qianhao: Ph.D. candidate at the School of Control Science and Engineering, Zhejiang University, and a member of Zhejiang University Huzhou Research Institute. Research interests: autonomous navigation of drones
Wang Ze: Ph.D. candidate at the School of Optoelectronic Science and Engineering, Zhejiang University, and a member of Zhejiang University Huzhou Research Institute. Research interests: Autonomous Systems, Motion Planning, SLAM
Gao Yuman: Ph.D. candidate at the School of Control Science and Engineering, Zhejiang University, and a member of Zhejiang University Huzhou Research Institute. Research interests: autonomous navigation of drones.
Wang Jingping: Master candidate at the School of Control Science and Engineering, Zhejiang University, and a member of Zhejiang University Huzhou Research Institute. Research interests: Embedded systems, motion planning.
Cui Can: Ph.D. candidate at the School of Control Science and Engineering, Zhejiang University, and a member of Zhejiang University Huzhou Research Institute. Research interests: Flight control, artificial intelligence in robotics.
Li Yuan: Bachelor graduate from the School of Control Science and Engineering, Zhejiang University, and a member of Zhejiang University Huzhou Research Institute. Research interests: Cluster perception and planning, large language models.
Ding Ziming: Ph.D. candidate at the School of Control Science and Engineering, Zhejiang University, and a member of Zhejiang University Huzhou Research Institute. Research interests: Robot navigation.
Wang Kaiwei: Professor and Ph.D. supervisor at the School of Optoelectronic Science and Engineering, Zhejiang University. Research interests: Intelligent visual imaging and perception technology, precision optical measurement.
Chao Xu: Vice Dean, Professor, and Ph.D. supervisor at the School of Control Science and Engineering, Zhejiang University. Research interests: Robotics and embodied intelligent systems, optimal control and learning of robots, machine learning dynamics and control.
Fei Gao (Corresponding Author): Tenured Associate Professor and Ph.D. supervisor at the School of Control Science and Engineering, Zhejiang University. Research interests: Aerial robots, autonomous navigation, motion planning, environmental perception, swarm robotics.



