
Professor Weiwei Wan’s team at Osaka University has developed a novel bimanual regrasp planning and admittance control approach for robots. By sequentially selecting grasping positions and object poses with two robotic arms, and performing three orthogonal grasp actions, the proposed approach actively reduces uncertainties in the object pose. Their study, titled “Bimanual Regrasp Planning and Control for Active Reduction of Object Pose Uncertainty”, was published in the IEEE Robotics and Automation Letters.
The high-precision pose data of the grasped objects, obtained in real time by the NOKOV motion capture system, was compared against the pose estimations generated by the proposed method using three successive graspings. This comparison validated the effectiveness of the method in reducing pose uncertainty.
Citation
Nagahama, Ryuta, Weiwei Wan, Zhengtao Hu, and Kensuke Harada. “Bimanual Regrasp Planning and Control for Active Reduction of Object Pose Uncertainty.” arXiv preprint arXiv:2503.22240 (2025).
Background
In the field of robotic manipulation, precise grasping remains challenging due to uncertainties in the object’s pose. Traditional solutions typically fall into two categories: sensor-based correction methods and fixture-based constraint methods. Although effective, both approaches have limitations—sensor-based methods require complex calibration and sensor fusion techniques, while fixture-based methods demand custom jigs tailored to object geometries, reducing system flexibility.
Contribution
This work proposes a bimanual regrasp planning and control method that performs three consecutive grasps without the need for external fixtures or additional sensors. By leveraging parallel grippers with flat finger pads and using admittance control, the method effectively reduces object pose uncertainty, significantly enhancing the flexibility and adaptability of robotic grasping operations.
Methodology
1. Regrasp Planning Using Orthogonal Triplets
The team first uses antipodal grasp planning to generate candidate grasp poses. These poses are then grouped according to the opening/closing directions of the gripper, ensuring that the selected grasps are mutually orthogonal. The three orthogonal grasps collectively constrain the object’s position and orientation, reducing uncertainty to a unique state.
2. Adapting to Object Pose Uncertainty
An admittance control strategy is developed to allow the robotic system to adapt its grasping pose based on real-time force feedback. Force/torque sensors located at the robot wrists detect contact forces during grasping, allowing the robot to adjust its motion dynamically. This prevents excessive force application, reducing the risk of deformation or damage to the object.
Real-world Experiments
The experiments involved two types of L-shaped objects—one with a square cross-section and the other with a diamond cross-section. These objects were placed randomly, and the dual-arm robot executed three consecutive grasp actions:
lFirst Grasp: Establishes the object’s initial position and orientation.
lSecond Grasp: Reduces one degree of freedom of uncertainty. Admittance control dynamically adjusts the grasping pose to conform to the actual object configuration.
lThird Grasp: Resolves the remaining degrees of freedom, moving the object to its target pose with stable grasp ensured by continued admittance control.
NOKOV motion capture system was used to obtain ground truth high-precision object pose data for comparison with the estimations produced by the proposed method.
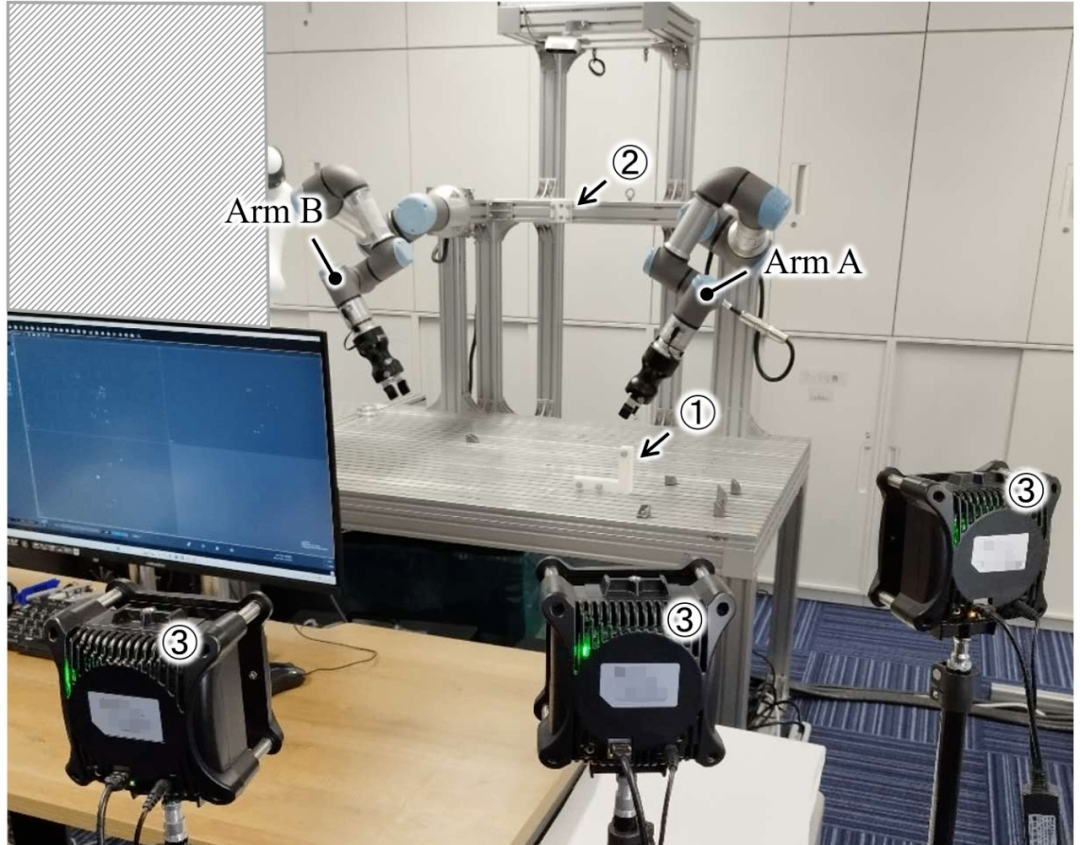
Experimental Platform ① Target object with optical markers; ②Reference markers for global positioning; ③ NOKOV motion capture system for detecting markers
Although the absolute errors in position and orientation were relatively large, the deviations were on the same order of magnitude as those observed using the NOKOV motion capture system. The proposed method exhibited strong repeatability and reliable relative inference performance in reducing pose uncertainty.
In repeated trials using three successive grasp actions, the object’s pose deviations from NOKOV ground truth were consistently under 0.5 mm, confirming the method’s efficacy in uncertainty reduction.
Corresponding Author
Weiwei Wan is a tenured associate professor at the Graduate School of Engineering Science, Osaka University, and a researcher at the Symbiotic Intelligent Systems Research Center. He is also a visiting researcher at RIKEN (BIKEN), Japan. He leads the development of the WRS open-source robotic planning and control system and has published over 200 papers. He holds six Japanese invention patents and serves as an Associate Editor for top-tier journals such as TRO, IJRR, and RAL. He has also served as an organizer or co-organizer of major international robotics conferences including IEEE ICRA, IROS, ROBIO, ARM, and ICCRE.



