Inspired by the collaborative manipulation of small organisms such as fish, birds, and ants, researchers have developed Multirobot Cooperative Transportation Systems (MRCTS) to transport heavy and oversized objects that a single robot cannot handle. These systems can be used in scenarios such as search and rescue operations, disaster response, and military logistics transportation. Existing MRCTS primarily transport payloads on flat surfaces, with little to no capability to transport objects on uneven terrain.
A research team led by Professor Liu Xinjun from the Department of Mechanical Engineering at Tsinghua University has proposed a Tracked Mobile Robot (TMR) to enhance terrain adaptability and expand the application scenarios of MRCTS.
The study, titled "Enhancing the Terrain Adaptability of a Multirobot Cooperative Transportation System via Novel Connectors and Optimized Cooperative Strategies," was published in the journal Frontiers of Mechanical Engineering and has been indexed in SCI.
NOKOV motion capture system was used to collect real-time pose information of the leader robot, helping to validate the performance and effectiveness of the proposed kinematic control strategy in real-world environments.
Citation Format
Liu, Quan, Gong, Zhao, Nie, Zhenguo, & Liu, Xin-Jun. (2023). Enhancing the terrain adaptability of a multirobot cooperative transportation system via novel connectors and optimized cooperative strategies. Frontiers of Mechanical Engineering, 18, 1-19. https://doi.org/10.1007/s11465-023-0754-2
Research Highlights
A novel six-degree-of-freedom passive adaptive joint was designed to connect the TMRs and the common payload, enabling the MRCTS to adapt to uneven terrain. Additionally, contact sensors on the adaptive joint measure the robot's position and orientation relative to the object, providing feedback control and addressing the challenge of outdoor robot localization.
A virtual leader and physical follower collaboration paradigm was proposed. The virtual leader robot describes the system's overall motion and manages the follower robots, avoiding system failure due to physical leader robot malfunctions. All physical robots in the system act as followers, aiding in initiating and maintaining transportation and improving the robustness of the transportation strategy to object mass.
A novel dual-loop kinematic control framework was introduced, where the inner loop relates to the motion control of follower robots, and the outer loop relates to the motion control of the virtual leader robot. The motion control of both types of robots is transformed into a trajectory tracking control problem for mobile robots.
Experimental Validation
The research team conducted trajectory tracking experiments and outdoor uneven terrain transportation experiments to verify the controller's performance in autonomous mode and the MRCTS's terrain adaptability in remote control mode, respectively.
Cooperative transportation along the target trajectory experiment
Four TMRs were used to cooperatively transport a 60 kg payload while tracking a circular trajectory. NOKOV motion capture system acquired the leader robot's position and orientation information within a 4.5×4.5 m area for feedback control. The results showed that the leader robot's tracking error converged to zero within a finite time, demonstrating the controller's effectiveness in enabling the system to track the desired trajectory despite initial tracking errors.
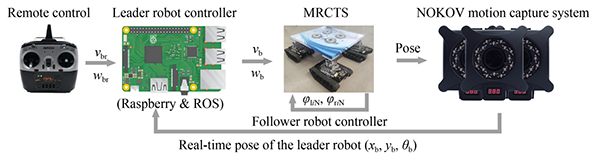
Experimental Setup and Information Flow
Cooperative transportation on uneven pavement
The TMR-based MRCTS was used to transport a 60 kg payload on uneven terrain to validate terrain adaptability. The MRCTS operated in remote control mode, where the leader robot's target speed was treated as its control speed, and the follower robot controllers converted the leader robot's target speed into their own target speeds. The results demonstrated that the TMR-based MRCTS could successfully transport the payload on uneven terrain, with excellent terrain adaptability proving the effectiveness of the adaptive joint and control strategy design.
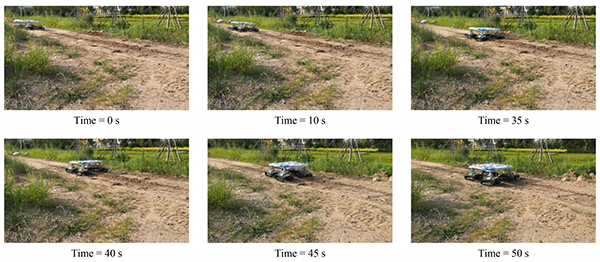
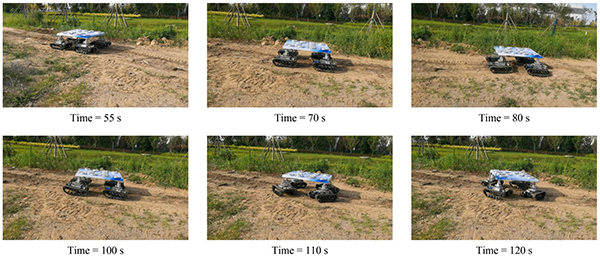
Experimental Sequence of Uneven Terrain Cooperative Transportation
NOKOV motion capture system collected real-time position and orientation information of the MRCTS leader robot for feedback control of the follower robots' trajectory tracking, validating the proposed kinematic control strategy's performance and effectiveness in real-world environments.