
Professor Shun He s research group from the School of Aeronautics, Northwestern Polytechnical University proposes a fast and accurate method for identifying the vibration characteristics of complex structures, such as aircraft wings or complete aircraft configurations. The method integrates Dynamic Mode Decomposition (DMD) with the Density-Based Spatial Clustering of Applications with Noise (DBSCAN) algorithm, and further develops a novel tool—the rank stabilization diagram—to distinguish physical modes from spurious modes generated during the identification process.
The proposed DMD-DBSCAN approach demonstrates high computational efficiency and strong practical applicability, making it particularly suitable for modal parameter identification of complex structures with large datasets. The related paper, Efficient modal parameter identification using DMD-DBSCAN and rank stabilization diagrams, was published in Aerospace Science and Technology, a CAS Zone-1 journal in the aerospace field.
NOKOV motion capture system provided high-precision, real-time displacement response signals for this study, effectively overcoming the spatial arrangement limitations of conventional displacement sensors. This enabled experimental validation of the proposed method on real complex structures and demonstrated the applicability of the DMD-DBSCAN framework in practical modal identification scenarios. Representative application scenes of the NOKOV system are shown below.
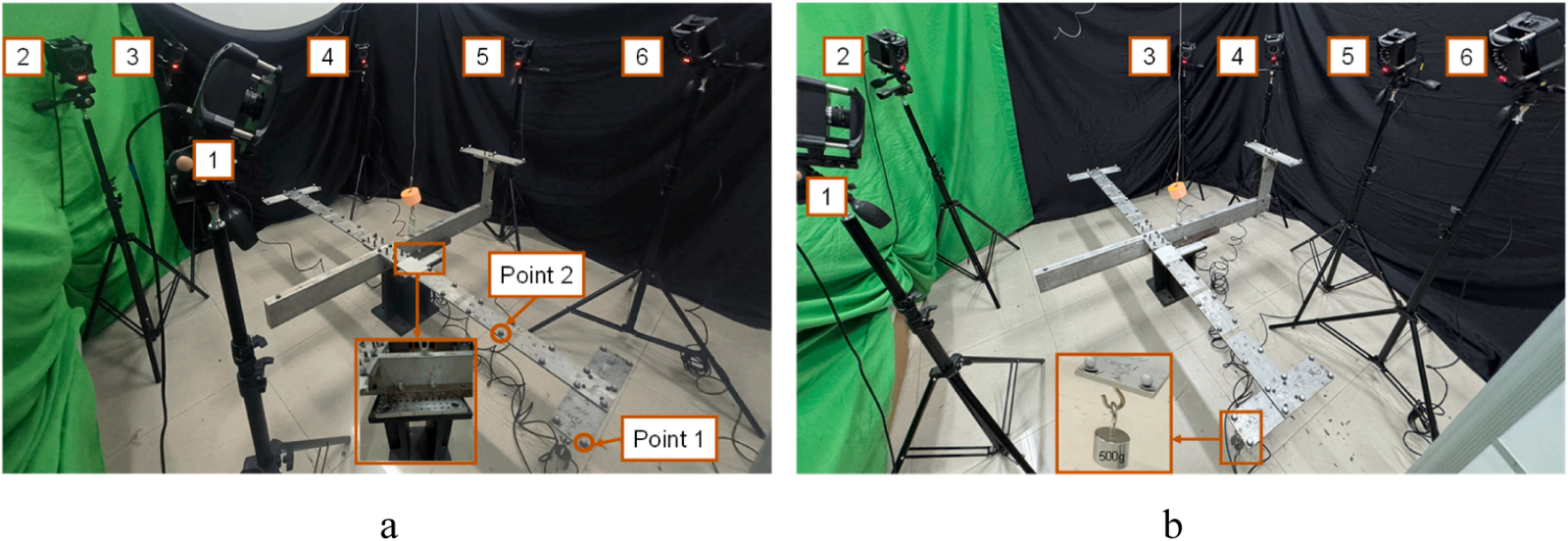
The static displacement measurements under two camera configurations. (a) configuration 1, (b) configuration 2.
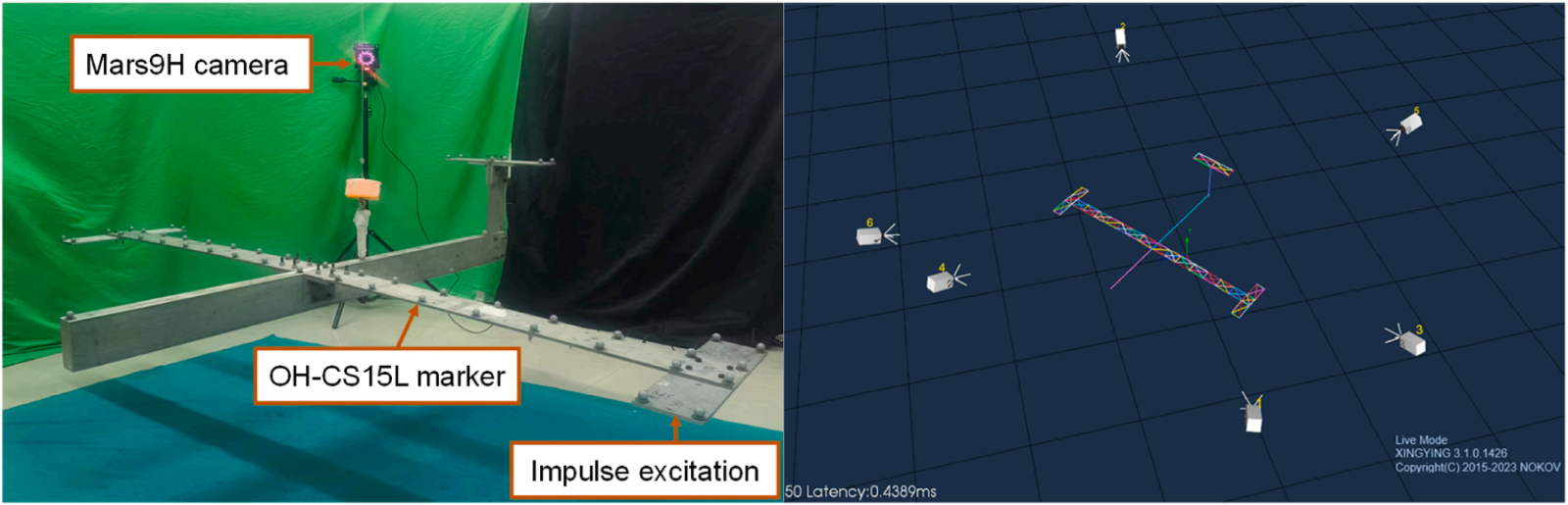
The dynamic response test setup, geometric model and camera position in NOKOV motion capture system
Citation
Chengyuan Wu, Zhichun Yang, Shun He, Efficient modal parameter identification using DMD-DBSCAN and rank stabilization diagrams, Aerospace Science and Technology, Vol. 161, 2025, 110112.
Author information
Chengyuan Wu (first author): Ph.D. candidate at Northwestern Polytechnical University. Research interests include aeroelasticity and structural dynamics.
Zhichun Yang: Professor and Ph.D. supervisor at Northwestern Polytechnical University; Director of the Institute of Structural Dynamics and Control, School of Aeronautics. Research interests include aircraft aeroelasticity and structural dynamics.
Shun He (corresponding author): Professor and Ph.D. supervisor at Northwestern Polytechnical University; National-level young talent. Research interests include aeroelasticity, aircraft structural design and analysis, transonic nonlinear flutter, hypersonic fluid-structure-thermal coupling, and morphing aircraft.



