
Understanding and replicating biological propulsion mechanisms is a major challenge in underwater robotics. Natural swimmers such as bullfrogs and cownose rays exhibit highly coordinated, multi-joint movements that are difficult to model and validate using conventional sensors.
Inspired by biological locomotion mechanisms in nature, Yichen Chu from Northeastern University proposed and validated two novel underwater robot propulsion approaches, taking the bullfrog hind limb and the cownose ray pectoral fin as biomimetic prototypes.
Accurate ground-truth motion data is essential to evaluate biomimetic mechanisms under real hydrodynamic conditions, ensuring that robot designs faithfully replicate biological motion and achieve effective propulsion.
In this research, an optical underwater motion capture system was employed to acquire precise three-dimensional motion data of both biological specimens and biomimetic robotic prototypes. In the reported experiments, the system was implemented using a NOKOV underwater motion capture solution.
Reflective markers were strategically attached to key joints and structural components. The system enabled:
High-frequency capture of joint angle variations
Accurate reconstruction of underwater trajectories and postures
Direct comparison between biological motion and mechanical imitation
Quantitative validation of simulation models under real fluid conditions
The captured motion data was synchronized with underwater six-degree-of-freedom force measurements, providing a comprehensive evaluation framework for propulsion performance.
Chu, Yichen, et al.Design and Implementation of a Biomimetic Underwater Robot Propulsion System Inspired by Bullfrog Hind Leg Movements.Biomimetics, 10(8), 498, 2025.
This study focuses on the locomotion mechanism of bullfrog hind limbs and presents a biomimetic underwater propulsion system based on a three-stage, four-bar linkage design that replicates the characteristic “kick–recovery” motion observed in real frogs.
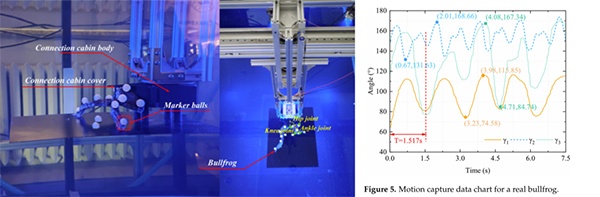
Kinematic data acquisition of bullfrog hind limb movements using the NOKOV underwater motion capture system
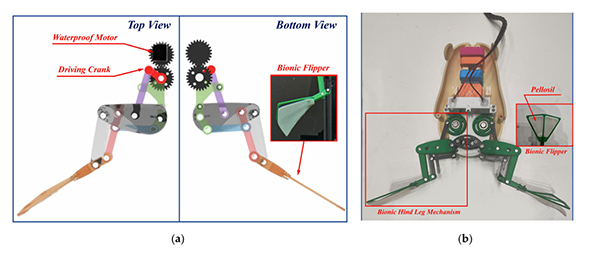
Prototype of the frog-inspired hind limb biomimetic propulsion mechanism, designed with a three-stage four-bar linkage and webbed foot for efficient underwater thrust.
Motion Capture: Six underwater cameras tracked reflective markers placed on the thigh, shank, and webbed foot of both the biological specimen and the biomimetic prototype, enabling high-resolution joint trajectory acquisition under submerged conditions. The motion capture setup was implemented using an optical underwater motion capture system, with the experimental system provided by NOKOV.
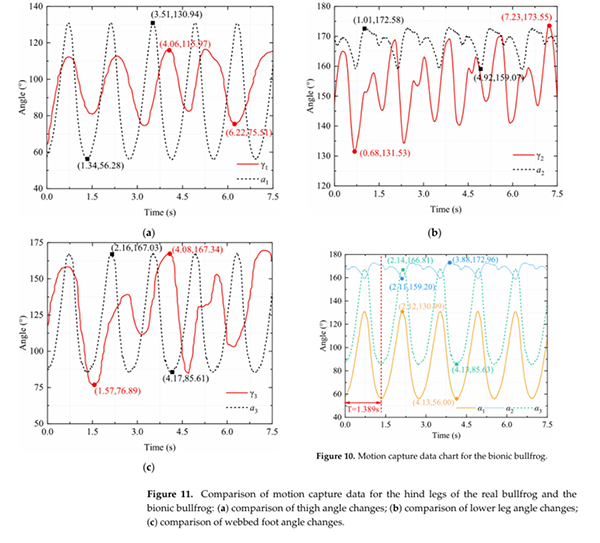
Comparison of angular trajectories between real bullfrog hind limb and biomimetic hind limb prototype; demonstrating motion similarity and validation of the linkage design.
Data Acquisition: Joint trajectories were captured at high temporal resolution to compare mechanical motion with biological reference data.
Six-degree-of-freedom underwater force measurements: The propulsion force of the biomimetic prototype was recorded, showing an average thrust of 2.65 N and peak thrust of 7.91 N.
Outcome: Motion similarity between the biomimetic prototype and real bullfrog hind limb was quantified at 98.5%, validating the mechanical design.
Chu, Yichen, et al.Design and Performance Study of a Six-Bar Mechanism Underwater Robot Based on Cownose Ray Bionics.Journal of Marine Science and Engineering, 13(6), 1156, 2025.
Inspired by the oscillatory propulsion of the cownose ray pectoral fins, this research proposes a biomimetic underwater robot based on a Watt-type six-bar linkage mechanism.
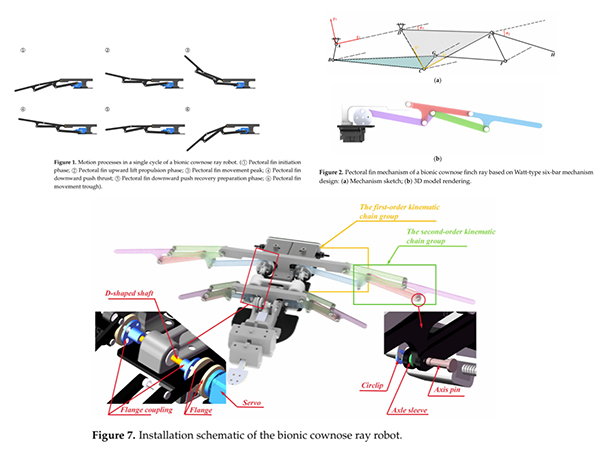
Design of a biomimetic cownose ray underwater robot based on a Watt-type six-bar linkage mechanism
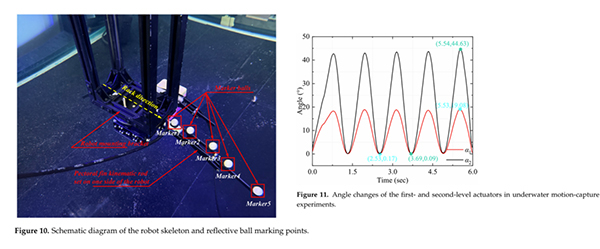
Motion Capture:Kinematic simulations verified the feasibility of the proposed mechanism. In underwater prototype experiments, the underwater motion capture system was used to measure the actual motion of the six-bar linkage.
Data Acquisition: The system enabled accurate recording and analysis of the biomimetic cownose ray robot’s motion under submerged conditions. The experimentally obtained angular trajectories closely matched the simulation results, with minor discrepancies primarily attributed to hydrodynamic resistance.
The NOKOV underwater motion capture system was used to record and analyze the motion of the biomimetic cownose ray robot.
Six-degree-of-freedom force measurements:Further six-degree-of-freedom force measurements demonstrated that the robot can generate forward thrust and lateral forces under synchronous and anti-phase flapping modes, respectively, indicating strong propulsion performance and controllable maneuverability.
Outcome: The system precisely captured the real underwater trajectories and postures of the biomimetic robot, enabling validation of the simulation models and comprehensive evaluation of the propulsion performance and stability of the six-bar biomimetic underwater robot.
This case study demonstrates how high-precision underwater motion capture can serve as a ground-truth reference for validating biomimetic propulsion mechanisms, bridging the gap between biological observation, mechanical design, and hydrodynamic performance evaluation.
Yichen Chu
Ph.D. Candidate, School of Mechanical Engineering and Automation, Northeastern University
Founder & CEO, Lindong Biomimetic Technology
Research Focus: Biomimetic Underwater Robotics
Yichen Chu received his B.Eng. degree from Northeastern University in 2019 and entered the university’s direct Ph.D. program in 2023. He was recognized as an APEA Asia-Pacific Young Leader and a Davos Global Shaper.
In 2021, he founded the Biomimetic Intelligence Laboratory at Northeastern University, leading research efforts in underwater biomimetic robotics.
In November 2023, he founded Lindong Biomimetic Technology, which received investments from MiraclePlus and Xiaomi Valley in 2024.
He was listed in the Hurun U25 Entrepreneurship Pioneers in 2024 and selected for the China Association for Science and Technology Young Talent Support Program (Ph.D. Track) in 2025.
Q: Why is underwater motion capture system critical for biomimetic robot propulsion research?
A: It provides ground-truth kinematic data that cannot be reliably obtained through simulation or onboard sensors alone, enabling accurate validation of biomimetic propulsion mechanisms under real hydrodynamic conditions.
Q: What biomimetic mechanisms are analyzed in this case study?
A: The study investigates frog-inspired hind limb and cownose ray-inspired pectoral fin mechanisms, experimentally analyzed using underwater motion capture to quantify motion fidelity and propulsion performance.
Q: How do researchers validate the performance of these mechanisms?
A: By capturing 3D joint trajectories and comparing them with biological reference data, as well as measuring propulsion forces, researchers can assess motion similarity and mechanical efficiency.



