
A team from the Institute of Automation, Chinese Academy of Sciences (CAS), has proposed a novel trajectory planning method for hybrid robots performing powerline inspections. This method can generate trajectories within 50 milliseconds, significantly reducing the time required for hybrid robots to autonomously land on powerlines and overcome obstacles. The research paper "Model-Based Trajectory Planning of a Hybrid Robot for Powerline Inspection" has been accepted by IEEE RAL and IROS 2024.
NOKOV motion capture system provided high-precision pose data to estimate the state of the hybrid robot, supporting the validation of the proposed method's effectiveness in real-world environments.
Citation
Z. Li et al., "Model-Based Trajectory Planning of a Hybrid Robot for Powerline Inspection," in IEEE Robotics and Automation Letters, vol. 9, no. 4, pp. 3443-3450, April 2024, doi: 10.1109/LRA.2024.3363535.
Research Background
Regular powerline inspections are crucial for ensuring the safe and reliable transmission of electricity, preventing hazards, and optimizing grid efficiency. Climbing robots can roll along powerlines, enabling high-precision and long-distance inspections, but they struggle with avoiding obstacles. Drones offer high flexibility for inspections by flying over powerlines but have limited endurance. Hybrid robots aim to combine the advantages of both climbing robots and drones, achieving high mobility and extended endurance.
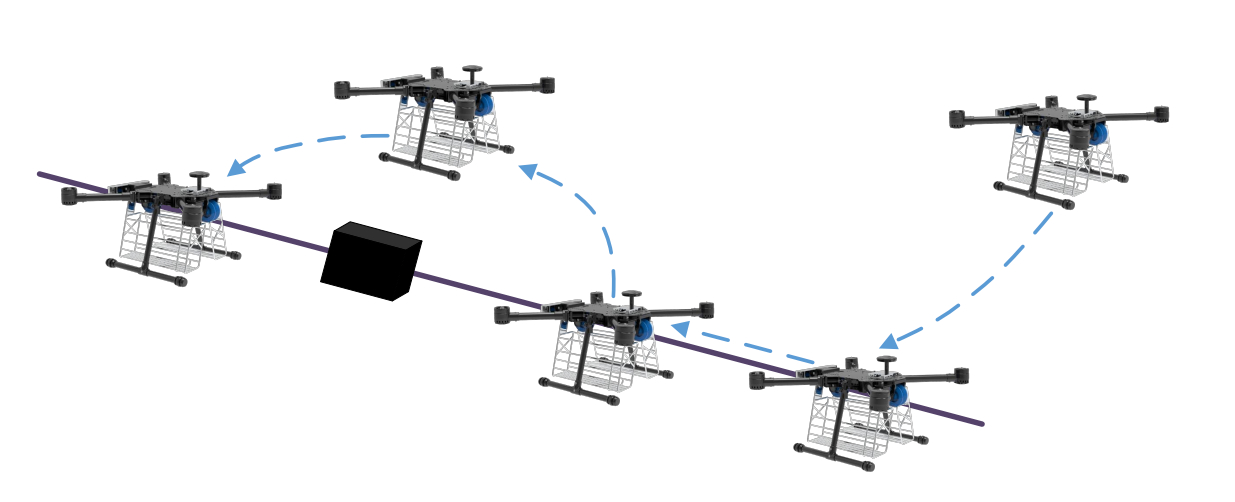
Hybrid Robot Powerline Inspection Process Diagram
Despite the potential of hybrid robots, much research has focused on platform design and autonomous landing, with insufficient attention to trajectory planning, which is key to autonomous inspections. This paper presents a novel approach to filling the gap in trajectory planning for hybrid robots. The trajectory planning problem is modeled as a nonlinear programming problem, incorporating dynamic and geometric constraints as hard constraints, with inspection quality as the optimization cost function. The method's effectiveness is validated through extensive simulations and real-world experiments.
Contributions of the Paper
A trajectory generation method for hybrid robot powerline inspections is proposed, significantly reducing the time cost for landing and obstacle avoidance navigation.
A general geometric model for hybrid robot powerline inspections is developed, including analytical formulas for precise landing and maximizing powerline visibility.
The proposed method is validated through extensive simulations and real-world experiments.
Experimental Process The research team validated the proposed trajectory planning method on a hybrid robot platform. The NOKOV motion capture system provided pose data for the robot, powerline, and obstacles, while an Extended Kalman Filter (EKF) was used for robot state estimation.
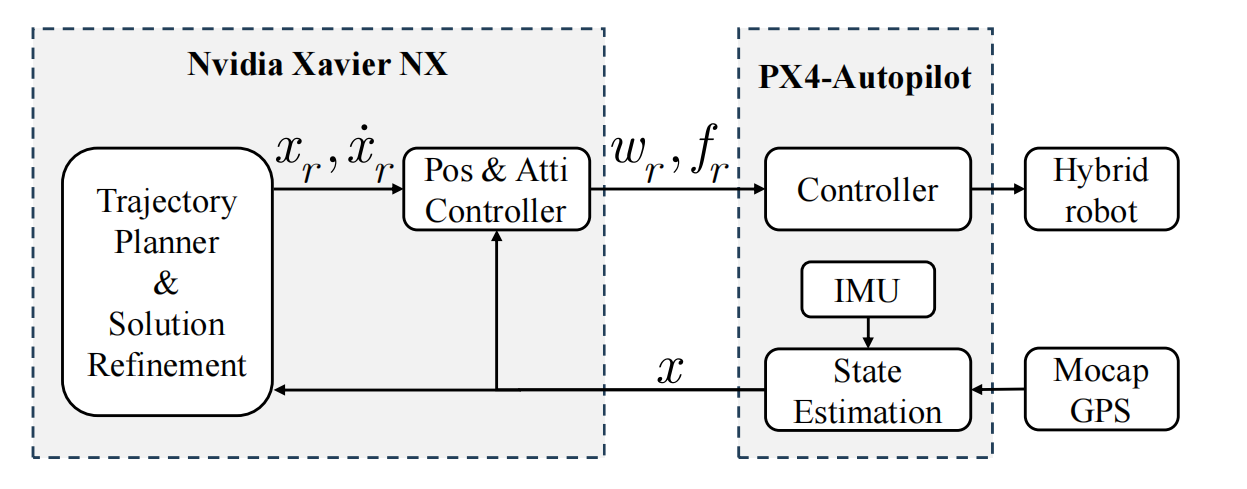
Hybrid Robot System Framework
To verify the method's effectiveness in real environments, researchers constructed an indoor simulated power transmission scenario with transmission lines and obstacles, conducting trajectory planning and tracking experiments.
The experimental results demonstrated that the planned trajectory keeps the robot directly above and aligned with the powerline, maximizing powerline visibility. Ultimately, the robot successfully overcame obstacles and landed on the powerline.
NOKOV motion capture system, by providing high-precision pose data, assisted in estimating the hybrid robot's state, verifying the trajectory planning method's effectiveness in real-world environments.
Author Information
Zhishuo Li, Ph.D. candidate at the Industrial Vision and Intelligent Equipment Technology Engineering Laboratory, Institute of Automation, CAS. Research focus: robotics, unmanned autonomous systems.
Yunong Tian, Associate Researcher at the Industrial Vision and Intelligent Equipment Technology Engineering Laboratory, Institute of Automation, CAS. Research focus: special robots, embodied intelligence, visual servoing.
Guodong Yang, Researcher at the Industrial Vision and Intelligent Equipment Technology Engineering Laboratory, Institute of Automation, CAS. Research focus: robotics, unmanned autonomous systems.
Yanfeng Zhang, Ph.D. candidate at the National Key Laboratory of Multimodal Artificial Intelligence Systems, Institute of Automation, CAS. Research focus: robotics, unmanned autonomous systems.
En Li, Researcher at the Industrial Vision and Intelligent Equipment Technology Engineering Laboratory, Institute of Automation, CAS. Research focus: special robot technology, robot control technology, intelligent sensing technology.
Zize Liang, Researcher at the National Key Laboratory of Multimodal Artificial Intelligence Systems, Institute of Automation, CAS. Research focus: advanced manufacturing.
Min Tan, Researcher at the National Key Laboratory of Multimodal Artificial Intelligence Systems, Institute of Automation, CAS. Research focus: intelligent robotics, advanced control.



