A research team from Shandong University published a paper titled "Adaptive sliding mode tracking and disturbance rejection control for cable-driven continuum robots in endoscopic surgery" in the journal Control Engineering Practice. The paper proposes an adaptive integral terminal sliding mode control method with an extended state observer (NESO-AITSMC) for cable-driven continuum robots (CDCRs).
In the experimental, NOKOV motion capture system provided high-precision end-effector pose data for the cable-driven continuum robot, supporting the research.
Citation
Zhang M, Chen Y, Gao Y, et al. Adaptive sliding mode tracking and disturbance rejection control for cable-driven continuum robots in endoscopic surgery[J]. Control Engineering Practice, 2026, 168: 106684.
Research Background
Cable-driven continuum robots achieve dynamic compliance navigation within complex luminal structures through bionic serpentine locomotion enabled by their multi-segment flexible architecture, and are increasingly being established as an ideal solution for advanced endoscopic surgery.
However, the presence of nonlinear frictional effects and the elastic deformation of cables in cable-driven systems give rise to accumulated end-effector errors. Conventional modeling techniques are inadequate in fully compensating for these nonlinear dynamic characteristics, leading to substantial model uncertainties. Furthermore, external disturbances, including unpredictable tissue contact forces and fluid resistance in the anatomical luminal environment, serve to further amplify trajectory deviations. Existing control methods are generally characterised by a lack of robustness and demonstrate limited accuracy when handling such multi-source uncertainties.
The main Contributions
To address the aforementioned challenges, this research proposes an adaptive integral terminal sliding mode control method with an extended state observer (NESO-AITSMC).
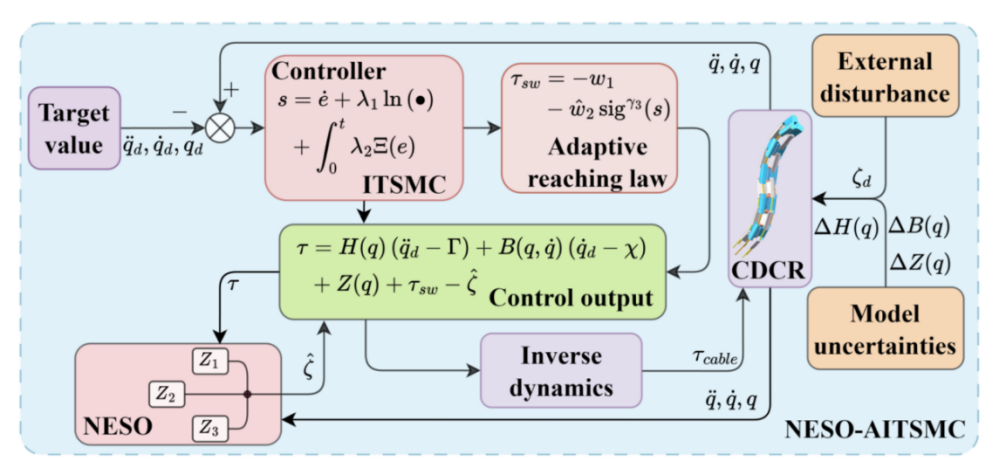
Controller of the CDCR
The main contributions of this research are summarized as follows:
1. A nonlinear extended state observer (NESO) with finite-time convergence properties is developed, enabling simultaneous estimation of model uncertainties and external disturbances, thereby enhancing the system’s disturbance rejection capability.
2. A terminal sliding mode surface, incorporating logarithmic nonlinear function terms, is designed to accelerate error convergence near the origin whilst eliminating steady-state errors through integral compensation.
3. An adaptive fast-reaching law based on sliding mode state feedback is proposed, establishing a nonlinear mapping between sliding.
Simulation
This section focuses on verifying the effectiveness of the proposed NESO-AITSMC scheme through numerical simulations. A CDCR is employed as the controlled plant, and its dynamic model is implemented.
Comparative analyses are performed among control strategies, including, NFTSMC and RITSMC, under conditions of model uncertainties and external disturbances.
To evaluate the disturbance rejection performance of the controller, a time-varying abrupt contact disturbance is applied to the system during t=4–5 s. Results indicate that all controllers exhibit increased tracking errors post-disturbance, but the proposed controller achieves the smallest deviations. The maximum endeffector position errors in the XYZ directions are ±3.433mm, ±0.275mm, and ±0.657mm, corresponding to improvements of 51.4%, 28.2%, and 54.8% over the best-performing baseline.
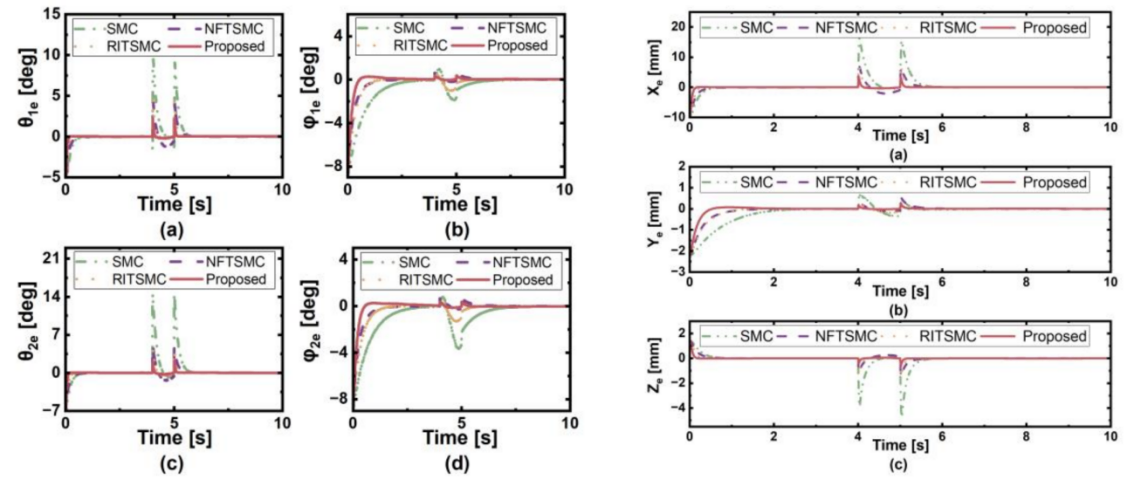
Angle tracking error comparison of multiple controllers under sudden disturbances
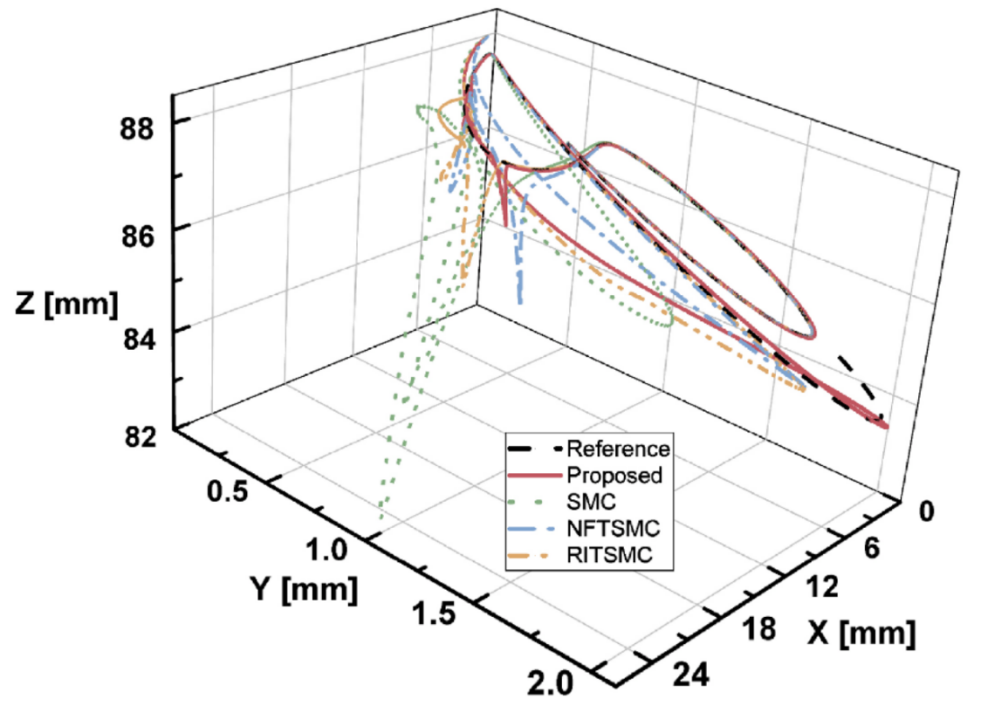
3D motion comparison of multiple controllers under sudden disturbances.
Experiment
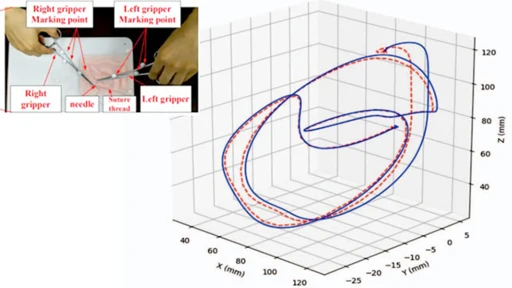
Trajectory tracking experiment
The experimental verification system comprises three primary components.
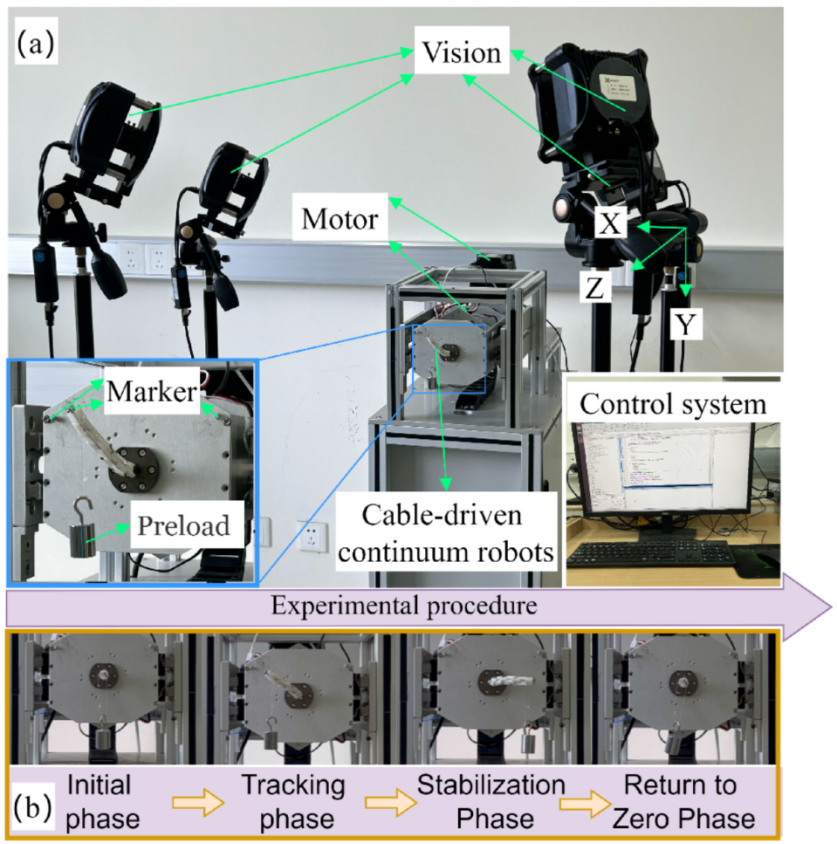
Trajectory tracking experiment. (a) experimental setup. (b) experimental procedure
(1) Bionic continuum mechanical body: PLA vertebral units fabricated using fused deposition modeling technology form a bionic flexible structure with a 10 mm diameter and an effective length of 88 mm.
(2) High-precision motion capture system: Equipped with six NOKOV motion capture cameras, it achieves end-effector pose measurement.
(3) Real-time control system: The NESO-AITSMC algorithm is built on Matlab 2023b, enabling bidirectional data communication with the ESP32 development board via serial communication to drive motors.
Given the impracticality of simulating real environmental timevarying disturbances, this study employs a simulation of external disturbances by adding 50g preload to the end-effector.
Experimental results demonstrate that, compared with conventional SMC, NFTSMC and RITSMC, the proposed controller achieves superior tracking accuracy with minimal trajectory error.
The proposed controller achieves peak tracking errors of 3.915mm, 4.261mm and 2.103mm in the X/Y/Z axes, representing reductions of 30.3 %, 78.2% and 51.7% compared to the best baseline method.
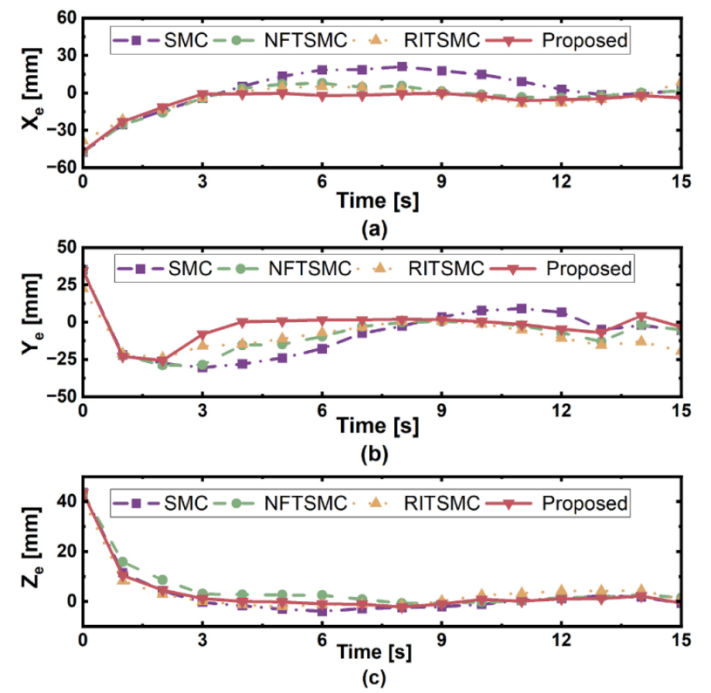
Experimental error comparison for CDCR trajectory tracking
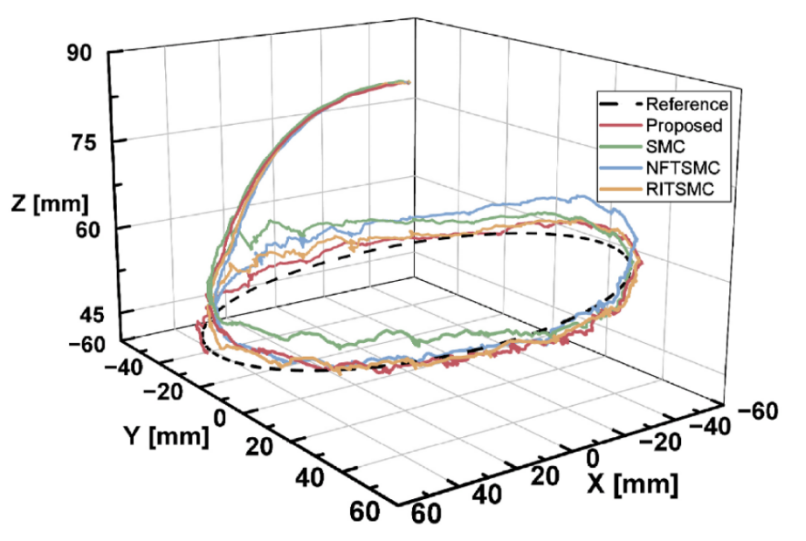
Trajectory comparison of multiple controllers in 3D motion experiments.
仿体实验
Phantom experiments
To validate the technical feasibility of the proposed control algorithm in clinically relevant scenarios, this study developed a biomimetic intestinal phantom model to perform biopsy simulation experiments,
In the experiment system, the Endoscopic forceps and a camera were integrated into the instrument channel. The utilization of a self-developed integrated control system coupled with real-time imaging guidance technology, the robot achieved precise spatial positioning of its end-effector and stable contact with simulated pathological tissue in an anatomical environment.
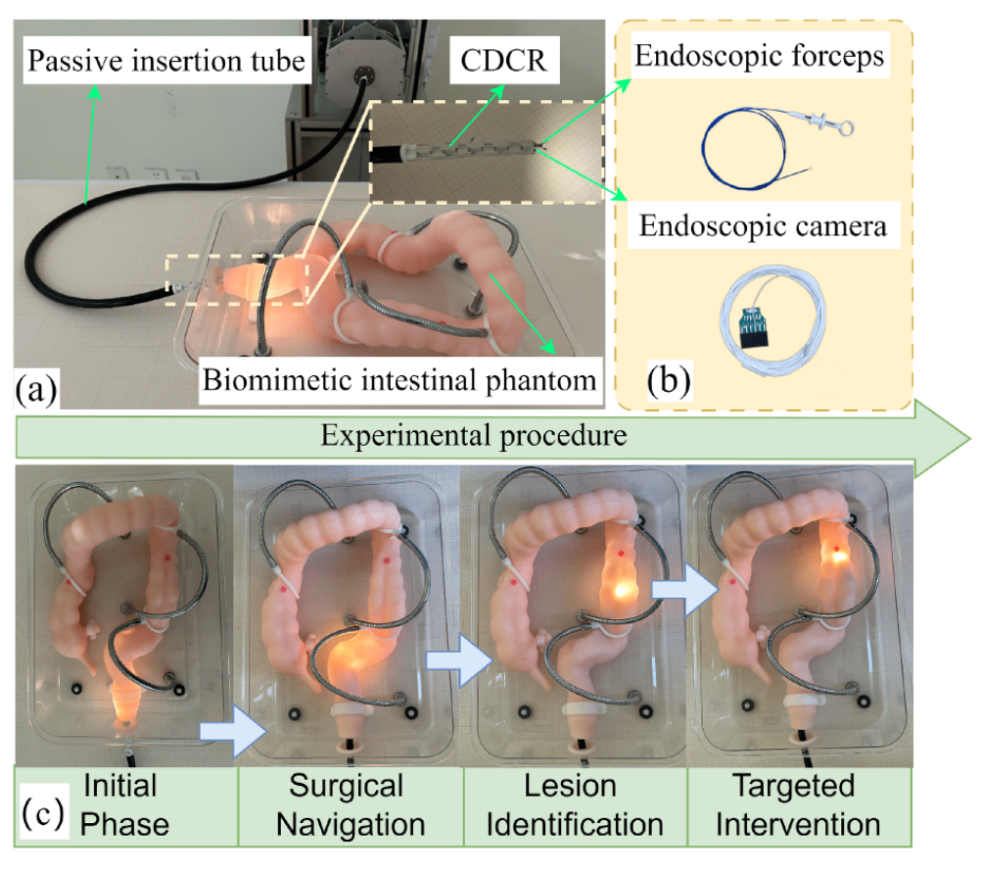
Phantom experiments. (a) experimental setup. (b) the utilized endoscopic biopsy forceps and the camera. (c) procedure of the intestinal model for endoscopic interventions.
NOKOV motion capture system acquires end-effector pose information from the cable-driven continuum robot (CDCR) in real time, assisting the control method in achieving effective motion control of the CDCR end-effector.