The research team led by Professor Zhengyu Wang at Hefei University of Technology proposed a segmented learning method based on Transformer networks for the kinematic modeling of a cable-driven parallel continuum robot. This method demonstrates superior performance and higher accuracy compared to traditional modeling approaches. The related research paper titled "Transformer-based segmented learning for kinematics modelling of a cable-driven parallel continuum robot" was published in the engineering technology journal Proc IMechE Part C: J Mechanical Engineering Science.
NOKOV optical motion capture system provided high-accuracy robot motion trajectory data for this study, facilitating the validation of the effectiveness of the Transformer-based segmented learning method.
Citation
Liu X, Wang Z, Li Z, Ma L, Wang D, Xu X. Transformer-based segmented learning for kinematics modelling of a cable-driven parallel continuum robot. Proceedings of the Institution of Mechanical Engineers, Part C. 2025;239(8):2942-2952. doi:10.1177/09544062241306683
Background
Cable-driven parallel continuum robots (PCRs) exhibit significant operational potential in confined spaces and complex environments due to their structural compliance. However, their kinematic modeling is complex. Traditional modeling methods suffer from issues such as high computational complexity and limited model accuracy. In recent years, data-driven learning approaches have been increasingly applied to the kinematic modeling of cable-driven parallel continuum robots. However, existing learning methods exhibit shortcomings when handling multiple spatial mappings, leading to limited modeling accuracy. To address these issues, the team led by Professor Zhengyu Wang at Hefei University of Technology conducted research on the kinematic modeling of a cable-driven parallel continuum robot.
Contributions
1. Proposes a learning-based kinematic modeling approach for a cable-driven parallel continuum robot.
2. Applies a segmented learning algorithm to systems with multiple spatial mappings within this approach to reduce learning complexity and enhance prediction accuracy.
3. Introduces the Transformer network within this approach to enhance the modeling capability between different system mappings, effectively handling regression tasks and achieving accurate predictions.
Research Subject
The study designed a planar cable-driven parallel continuum robot (PCR) with three degrees of freedom, including in-plane translation and rotation. The robot's end-effector is shaped like an equilateral triangle and is connected to the linkage through a coupling unit. The continuum mechanism uses a single-degree-of-freedom design.
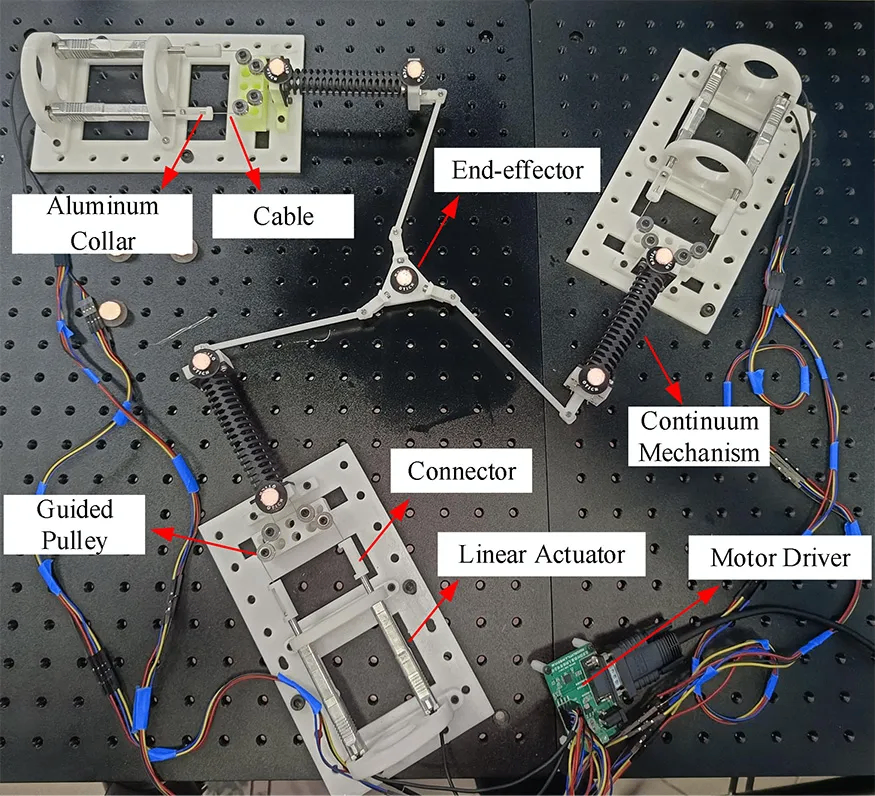
Figure 1 Structure of the PCR, mainly including the end-effector, continuum mechanisms, cables, and linear actuators.
Modeling Method
Segmented Learning Strategy: Through segmented learning, the study separately established the mapping from the task space to the configuration space (i.e., from the end-effector position vector to the continuum mechanism joint prediction vector) and the mapping from the configuration space to the actuation space (i.e., from the continuum joint prediction vector to the motor displacement prediction vector).
Transformer Network Architecture: The Transformer network is used as the fundamental network structure unit. It implements long-sequence modeling through a self-attention mechanism and a feedforward neural network, providing global contextual feature extraction and parallel computing capabilities.
Through the segmented learning strategy, the Transformer network can more accurately capture the mapping relationships between the task space, configuration space, and actuation space.

Figure 2 Structure of the Transformer-based Segmented Learning (TBSL) method, including Transformer-based neural network units and the segmented learning framework from task space to configuration space to actuation space.
Real-world Experiments
Experimental Platform: The setup included the cable-driven parallel continuum robot, motor drivers, a calibration rod, and the NOKOV optical motion capture system. To capture the position of the robot's end-effector and the bending angles of the continuum mechanism in real-time, four sets of Pluto 1.3C motion capture cameras were deployed to validate the effectiveness of the modeling method.
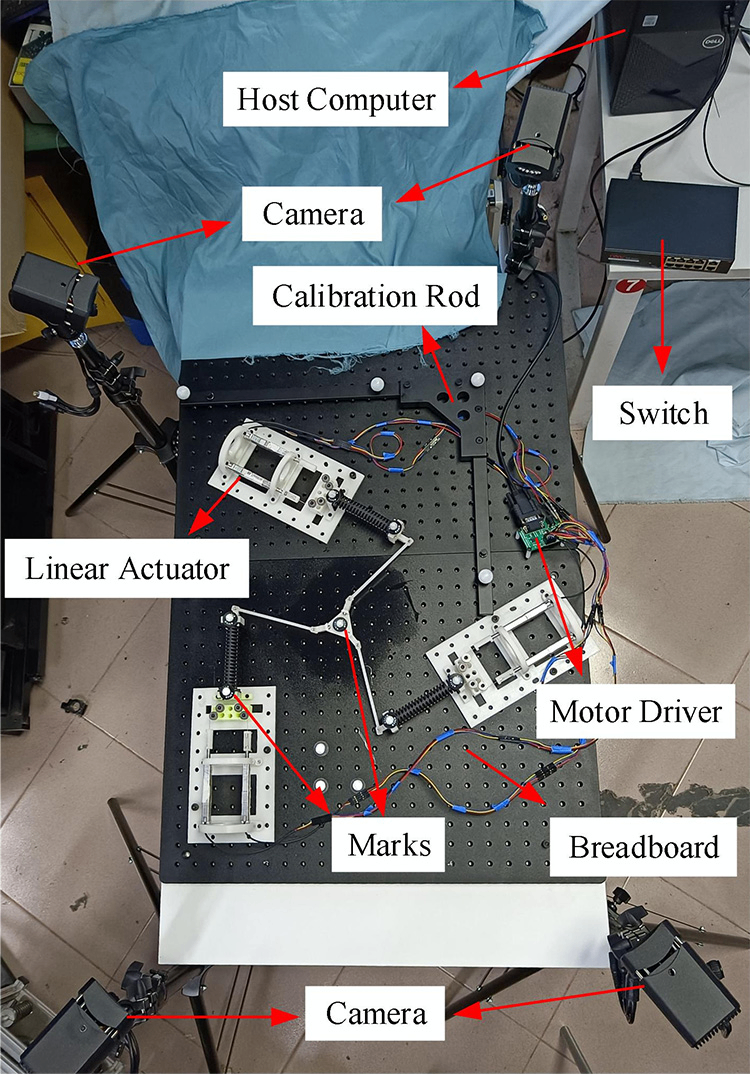
Figure 3 Experimental platform, including the cable-driven parallel continuum robot (PCR), NOKOV motion capture cameras, motor drivers, and the host computer.
Experimental Design: The study designed circular and square trajectories to evaluate the trajectory tracking accuracy of the proposed method and traditional modeling methods.
Experimental Results: The Transformer-based segmented learning method demonstrated significantly lower maximum error, mean absolute error (MAE), and root mean square error (RMSE) under both circular and square trajectories compared to traditional modeling methods.
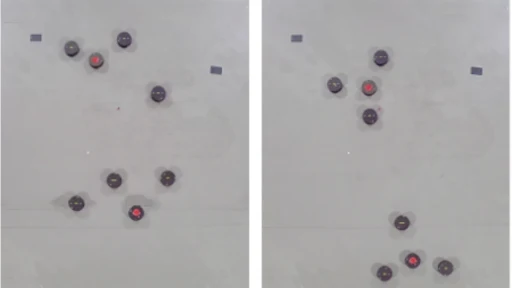
Experiment of the cable-driven parallel continuum robot (PCR)
NOKOV optical motion capture system provided actual robot motion trajectory data with sub-millimeter accuracy for error analysis, validating the effectiveness and superiority of the new modeling method.
Authors’ Profile
Xuchang Liu, Master's student, School of Mechanical Engineering, Hefei University of Technology. Main research areas: Cable-driven continuum robots, continuum surgical robots.
Zhengyu Wang (Corresponding Author), Associate Professor, Master's Supervisor, School of Mechanical Engineering, Hefei University of Technology. Main research areas: Advanced robotics and intelligent control, rigid-soft coupled medical robots, intelligent manufacturing robotic equipment and systems.
Ziqian Li, Master's student, School of Mechanical Engineering, Hefei University of Technology. Main research areas: Robotics, Artificial Intelligence.
Le Ma, Master's student, School of Mechanical Engineering, Hefei University of Technology. Main research areas: Cable-driven continuum robots, continuum exploration robots, Artificial Intelligence.
Daoming Wang, Professor, Doctoral Supervisor, School of Mechanical Engineering, Hefei University of Technology. Main research areas: Robotics technology and applications, vehicle brake-by-wire technology, intelligent structures and systems.
Xinzhou Xu, Master's Supervisor, School of Internet of Things, Nanjing University of Posts and Telecommunications. Main research areas: Intelligent audio signal processing, machine learning and artificial intelligence.