
The research team led by Professor Yuan Chen from Shandong University (Weihai) recently published a paper titled "Passivity-based variable damped sliding mode control for cable-driven wave motion compensation device under hybrid disturbances" in the journal Information Sciences, which has been indexed by SCI and EI.
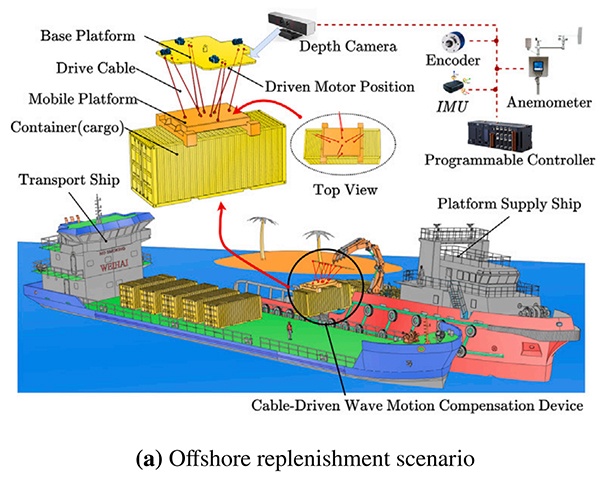
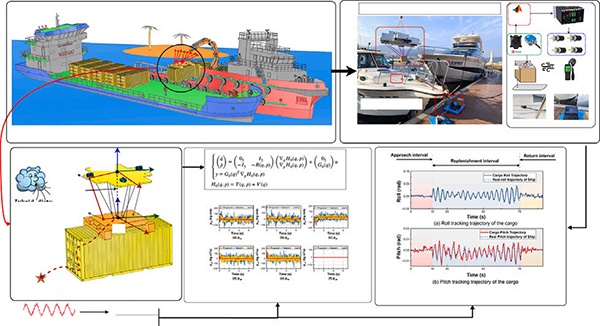
In maritime replenishment and ocean engineering tasks, cable-driven wave motion compensation devices face multiple control challenges arising from strong disturbances and low-damping environments. This paper proposes a passivity-based variable damped sliding mode control method, achieving a unified design for finite-time convergence, vibration suppression, and trajectory tracking. NOKOV motion capture provided high-precision 3D load pose data for laboratory experiments, serving as the benchmark for controller closed-loop feedback and performance evaluation.
Compared to existing sliding mode methods, the proposed framework demonstrates stronger adaptability when handling different payload masses, exhibits higher robustness in noisy and constrained environments, and better aligns with the practical requirements of wave compensation and other suspended CDPR applications.
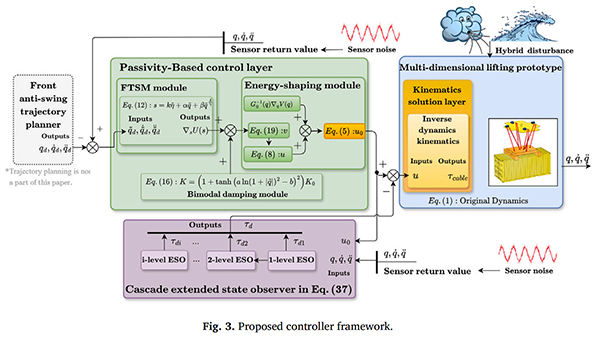
1. This paper proposes a port-Hamiltonian-based control framework that simultaneously considers the acceleration constraints of suspended cable structures and actuator saturation.
2. A novel synergistic control framework is designed to enhance anti-swing capability and trajectory tracking performance through the integration of sliding mode input and damping modulation.
3. A bimodal damping saturation strategy is proposed, utilizing a hyperbolic tangent function to balance convergence speed and swing suppression.
4. A finite-time cascaded observer is designed to suppress sensor noise and rapidly reconstruct disturbances.
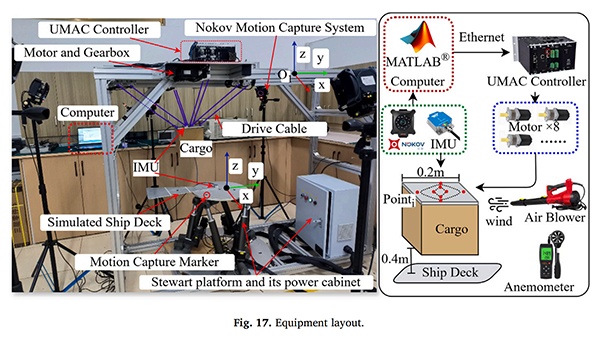
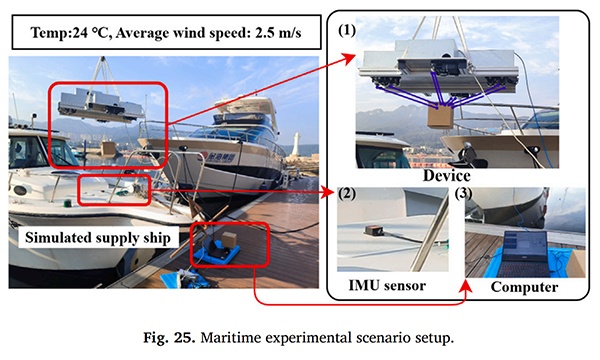
In laboratory experiments, the research team constructed a 1:10 scaled five-degree-of-freedom eight-cable wave compensation prototype, with a six-degree-of-freedom parallel platform simulating ship motion. The prototype integrated a UMAC motion controller, establishing communication via MATLAB/Simulink with IMU sensors and NOKOV motion capture to ensure synchronized real-time pose feedback. The method's stability and engineering deployability were further validated through maritime replenishment trials under real wind and wave disturbances.
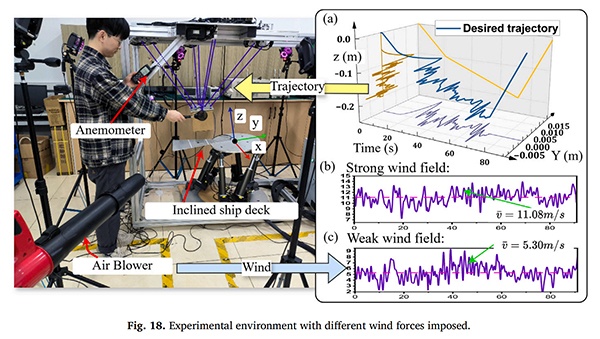
Results show that under comparable control energy consumption, the proposed method reduces the ITAE (Integral of Time-weighted Absolute Error) index by approximately 58%–68%. In real sea trials, facing wind speed disturbances of 5–10 m/s, the average position and attitude tracking errors were reduced by over 55%.
NOKOV motion capture provided high-precision 3D load pose data for laboratory experiments, serving as the benchmark for controller closed-loop feedback and performance evaluation.
Author Profiles
Zongbin Hou, Master's student, School of Low-Altitude Science and Engineering, Shandong University. Main research areas: Design and control of cable-driven parallel robots.
Ruihao Sui, Master's student, School of Low-Altitude Science and Engineering, Shandong University. Main research areas: Design and control of cable-driven parallel robots.
Yuan Chen (Corresponding Author), Professor and Deputy Dean, School of Mechanical, Electrical & Information Engineering, Shandong University. Main research areas: Robotic mechanisms and motion control.



