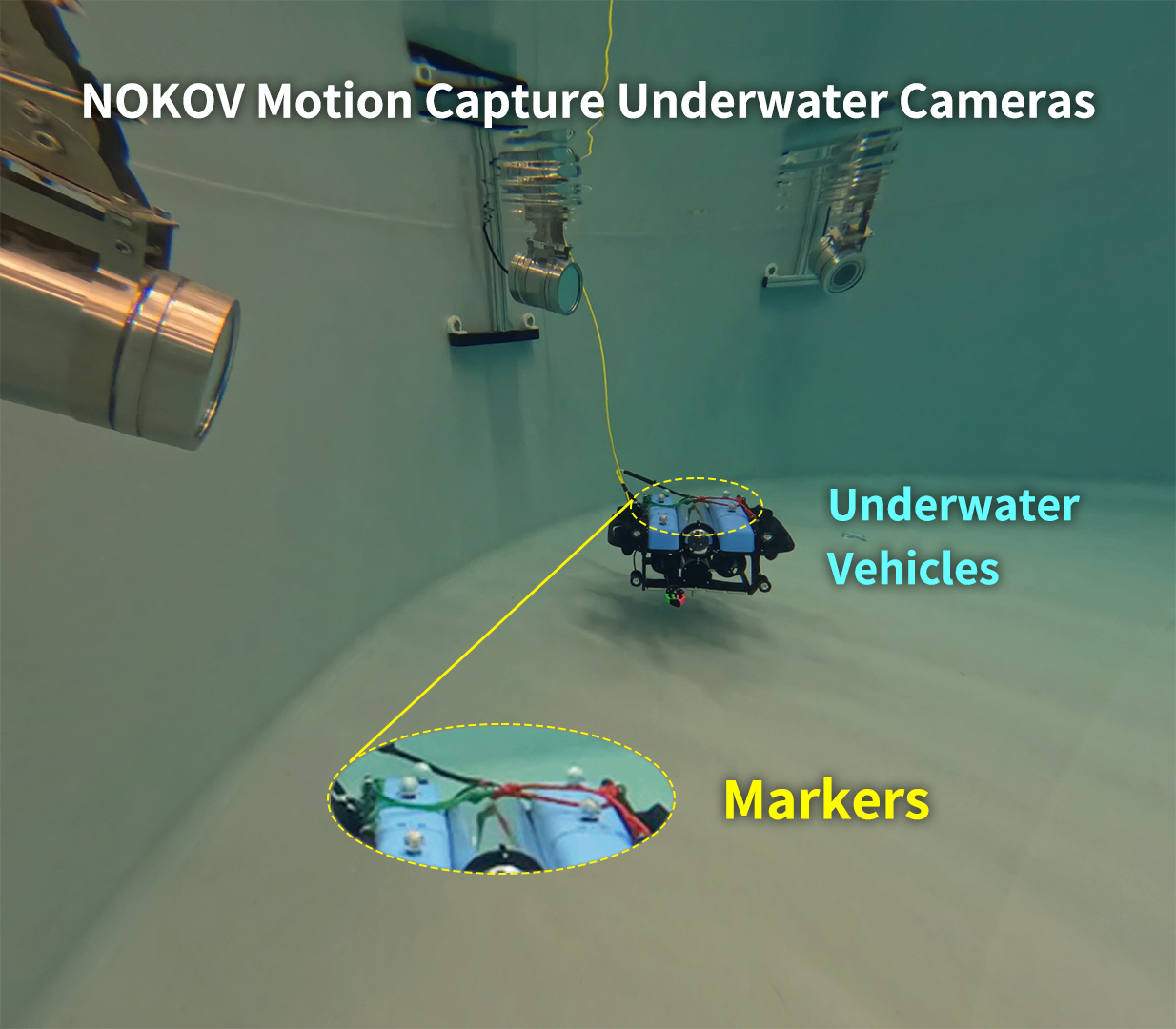
Dr. Daniel Dücker from the Munich Institute of Robotics and Machine Intelligence (MIRMI), Technical University of Munich, uses the NOKOV Motion Capture System (Underwater) to obtain high-precision ground-truth poses of underwater robots, which can be used for training data generation and for the validation of control and estimation algorithms.