 Sub-millimeter Accuracy
Sub-millimeter Accuracy
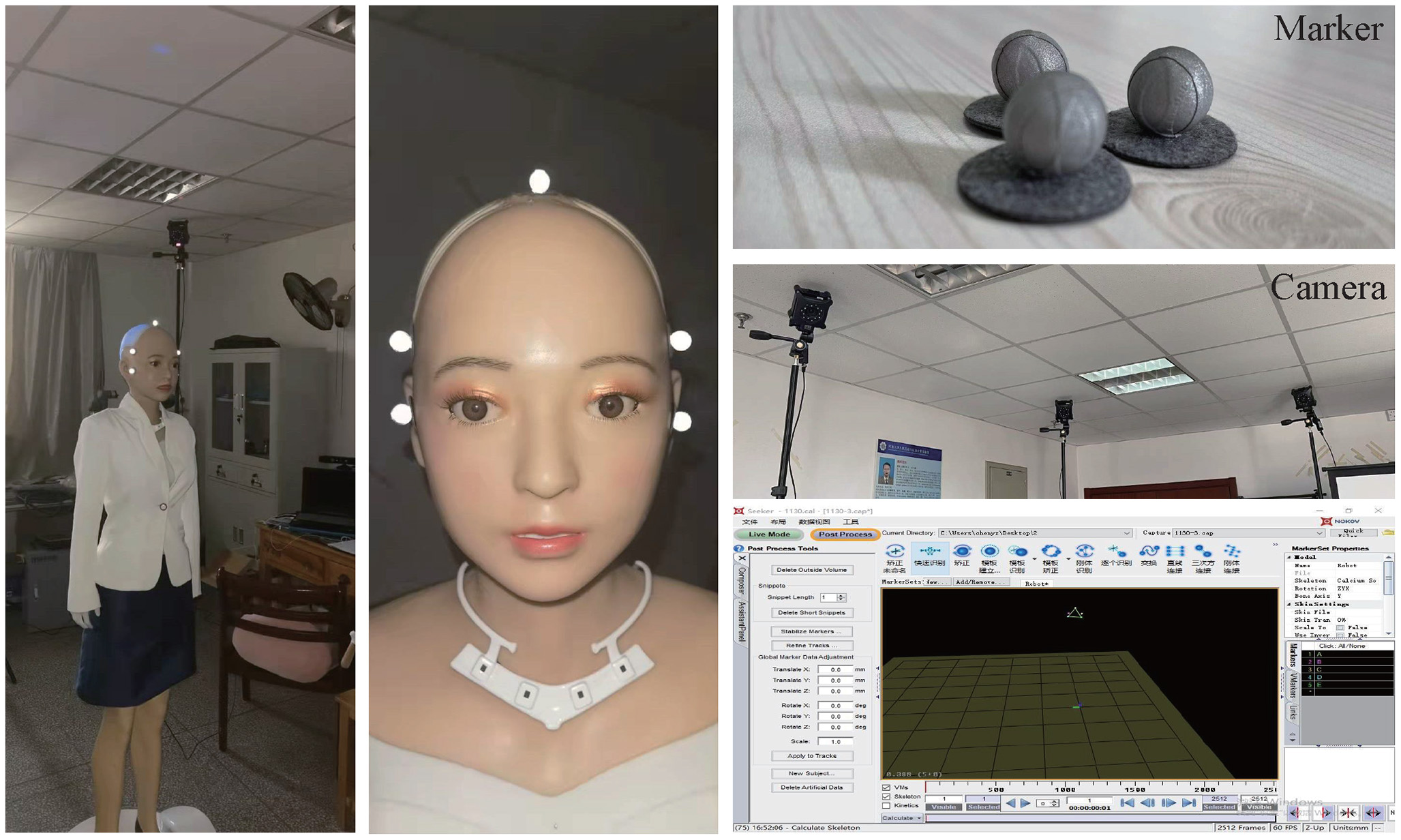
Optical and inertial fusion tracking delivers sub-millimeter positioning accuracy and 0.1° angular precision for high-fidelity motion recording.
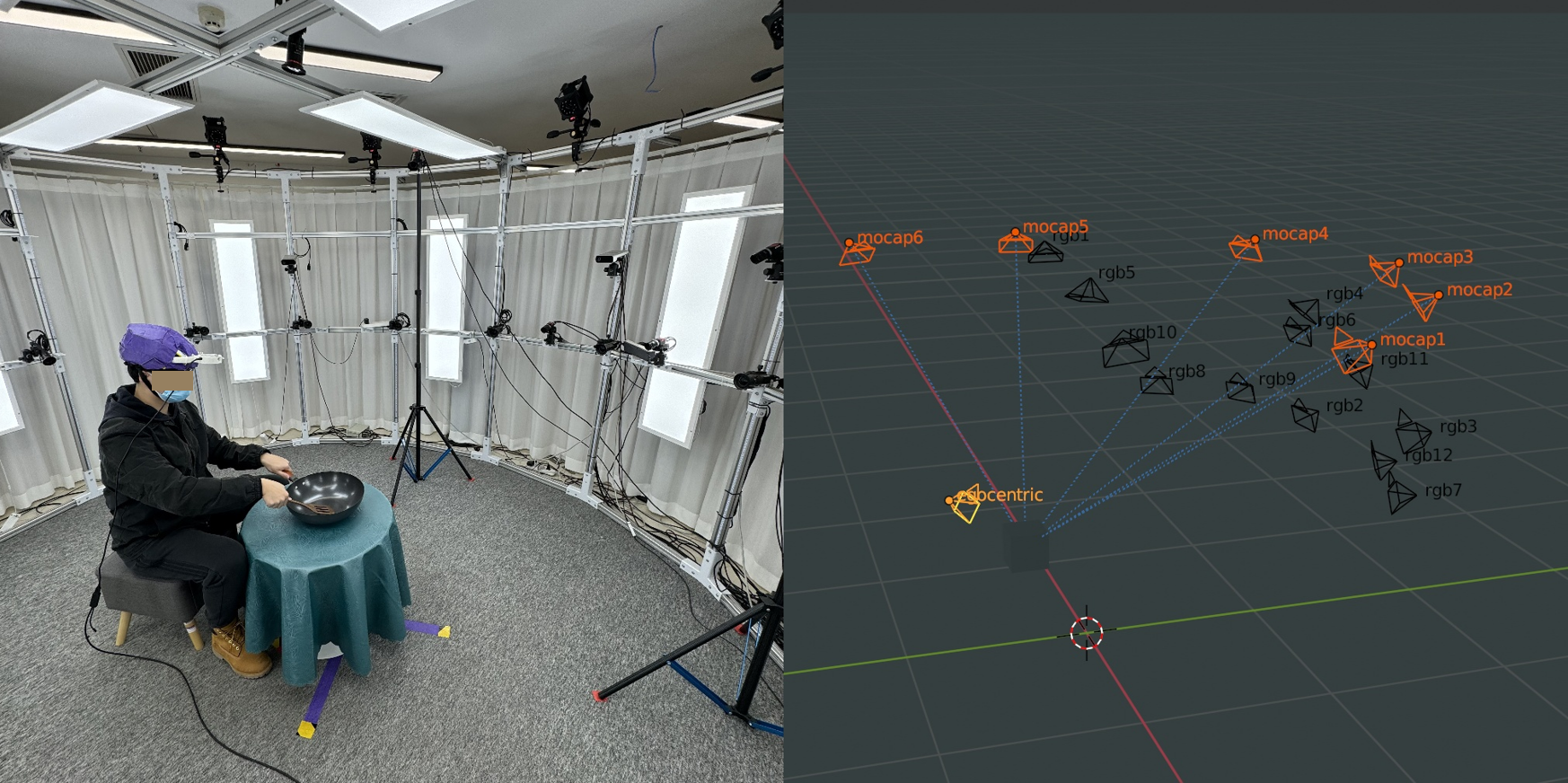
Multi-Agent & Multimodal
Simultaneously capture humans, tools and robots, synchronizing video, force, EMG and other sensor data for full-scene perception.
Real-Time Data Streaming
Fully compatible with ROS/ROS2, VRPN and SDK interfaces to seamlessly connect with simulation and robot control platforms.
Flexible Deployment
Support both marker-based and AI markerless solutions, adaptable from laboratory environments to large-scale operation scenarios.
High-Quality Dataset
Provide 1,000+ hours of cleaned human motion data with 100,000+ high-quality samples for AI and robot algorithm training.
 Precise Hand & Finger Tracking
Precise Hand & Finger Tracking
Capture fine-grained hand, finger, and object movements with high spatial accuracy.
Human-Object Interaction Capture
Record coordinated interactions among hands, tools, and manipulated objects.
Multimodal Demonstration Data
Synchronize motion capture with video, force, tactile, and other sensor data.
Robot Learning Ready
Generate structured datasets for imitation learning, LfD, and policy training.
Real-Time Integration
Seamlessly connect with robot control, simulation, and training platforms.
 High-Fidelity Motion Data for Training
High-Fidelity Motion Data for Training
Deliver precise whole-body motion capture data to fuel robot algorithm training.
Human-to-Robot Motion Retargeting
Convert captured human motions into executable robot movement commands.
Simulation Platform Integration
Connect smoothly with mainstream simulation environments for iterative policy tuning.
Reinforcement Learning Support
Provide standardized motion samples to accelerate reinforcement learning iteration.
 Real-Time Motion Tracking
Real-Time Motion Tracking
Ultra-low latency motion capture and real-time data streaming ensure that every operator movement is instantly reflected by the robot, enabling responsive and intuitive control.
Support for Mainstream Humanoid Robot Platforms
Compatible with URDF models of mainstream humanoid robots and capable of customized integration and development for specific robot platforms.
 Sim-to-Real Closed-Loop Validation
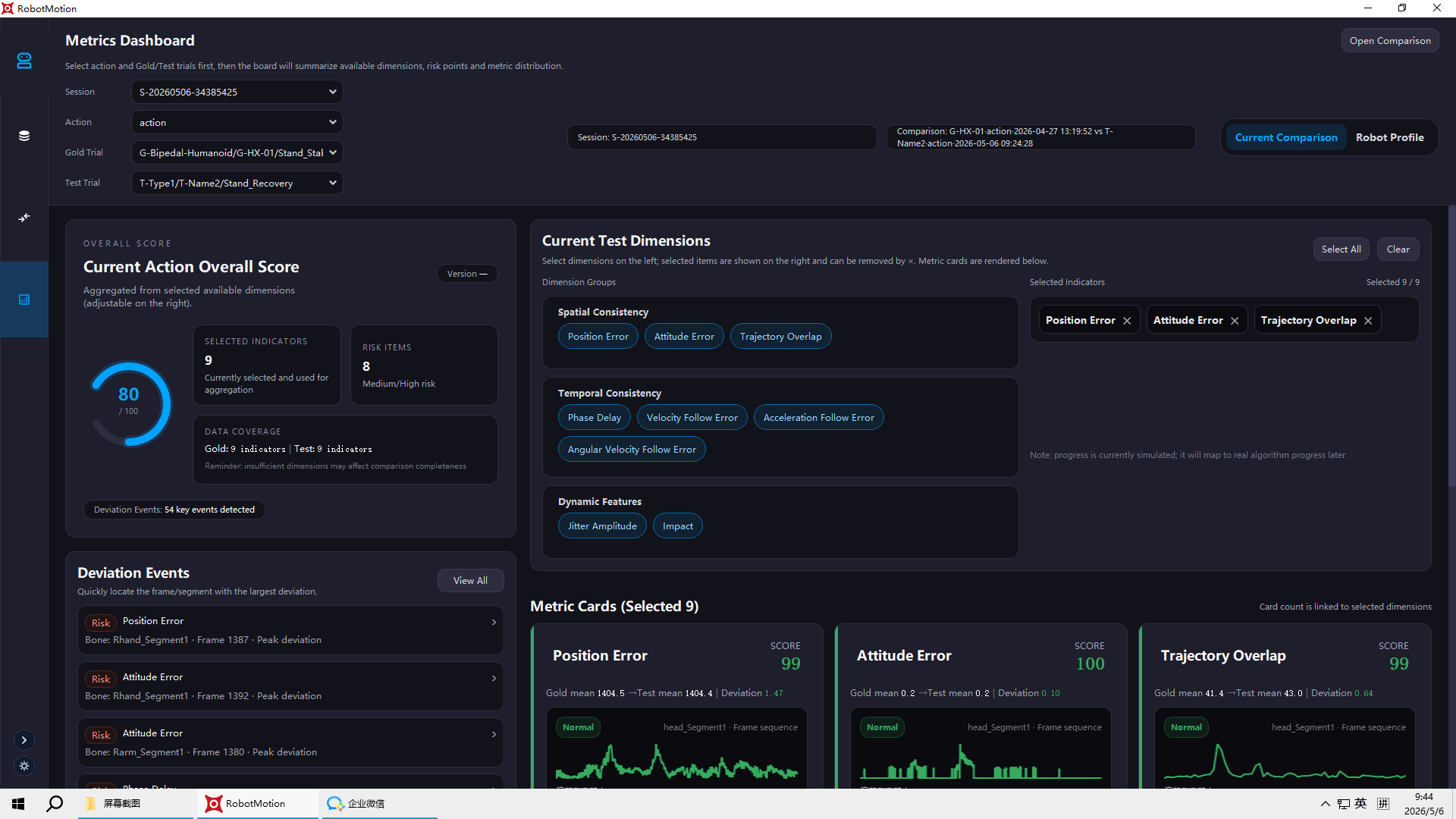
Sim-to-Real Closed-Loop Validation
Build quantitative comparison between simulated and physical robot data; feed field data back into training models. Supports position/velocity/acceleration comparison and user-defined evaluation benchmarks.
 General-purpose Robot Motion Evaluation Platform
General-purpose Robot Motion Evaluation Platform
Solves consistency challenges in mass robot production, delivering standardized, repeatable motion testing and industry benchmark solutions.
 Mainstream Robot Fast Adaptation
Mainstream Robot Fast Adaptation
Adapts to mainstream robots such as Unitree and AgiBot through self-developed retargeting and training models, supporting customized scenario-oriented development.
High-fidelity Embodied Motion Reproduction
Supports avatar-style remote control for walking, running, jumping and diverse movements. Delivers low-latency, high-fluidity robot motion reproduction for exhibition and commercial scenarios.