
The research team led by Professor Xu Yundou at Yanshan University developed a hexapod load-carrying robot based on the Chebyshev linkage. Its leg structure and multi-drive system have been optimized to achieve high rigidity, lightweight construction, a 20kg payload capacity, and multi-terrain adaptability, providing a novel solution for operations in complex environments. The related research paper, "Development of a Load-Bearing, Terrain-Adaptive Hexapod Robot With Chebyshev-Linkage Legs," was published in the Journal of Field Robotics, a CAS Q2 journal in the field of robotics.
NOKOV motion capture system provided pose data to verify the differences between the robot's simulated and actual movements. The data showed that the theoretical and actual values were essentially consistent, proving the correctness of the theoretical analysis.
Citation
Ju, Z., Wu, R., Guo, D. and Xu, Y. (2025), Development of a Load-Bearing, Terrain-Adaptive Hexapod Robot With Chebyshev-Linkage Legs. Journal of Field Robotics. <https://doi.org/10.1002/rob.22463>
Background
Traditional wheeled robots face challenges in dynamic adjustment and stable movement across complex, unknown terrains. Inspired by animal locomotion, researchers have designed legged robots to better handle such terrains. However, an excessive number of actuated joints in legged robots can increase failure rates and compromise payload capacity. Therefore, optimizing the number of actuated joints and enhancing load capacity have become key research focuses. Against this backdrop, this study investigates hexapod robot payload capacity and drive system optimization based on the Chebyshev linkage.
Contributions
This paper proposes a novel leg-foot structure design — HexaBeast. This design integrates an overconstrained leg-foot architecture based on the Chebyshev linkage, principles of high rigidity and low friction, and a multi-drive system to improve the robot's adaptability to various terrains including snow, sand, puddles, ice, and desert.
System Design
Overall Platform Design: The hexapod robot employs a Chebyshev linkage structure, driven by stepper motors, and incorporates servos and a linear motor within the body to achieve lateral movement and torso twisting.
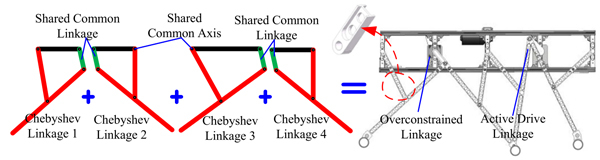
Innovative Leg Structure: The leg consists of four Chebyshev linkages connected in series, forming an overconstrained (statically indeterminate) structure. This reduces the number of actuated joints, avoids complex transmissions, and enhances load-bearing capacity.
Special Frame Design: A multi-drive collaborative lateral movement frame structure was designed to enable robot lateral shifting. When not engaged in lateral movement, the torso can twist to adapt to terrain.
Leg structure of the HexaBeast robot
Characteristic Analysis
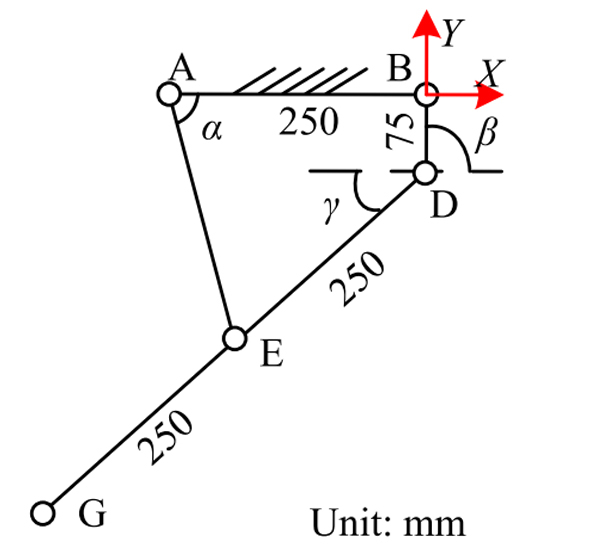
Chebyshev Linkage Length Parameter Analysis: When the AE link length is 250mm, it ensures a certain obstacle-crossing capability while minimizing body fluctuation.
Static Mechanical Analysis of the Leg: Compared to non-overconstrained structures, the overconstrained structure exhibits higher stiffness, less deformation, and better force distribution, resulting in smaller forces at the leg endpoint at specific angles.
Comparison of Force Conditions on Leg Links During Motion: The overconstrained structure also improves the force distribution within the leg during robot movement.
The analysis indicates that optimizing Chebyshev linkage lengths and adopting an overconstrained leg structure can enhance robot performance and payload capacity.
Length parameters of the Chebyshev linkage.
Field Experiments
Motion Verification Experiment: The NOKOV motion capture system was used to collect robot motion data to verify differences between simulated and actual movements. Twelve capture cameras tracked six randomly selected points (KR, MR, HR, BR, BL, ML). Results showed that simulated and actual motions were essentially consistent, validating the theoretical analysis.
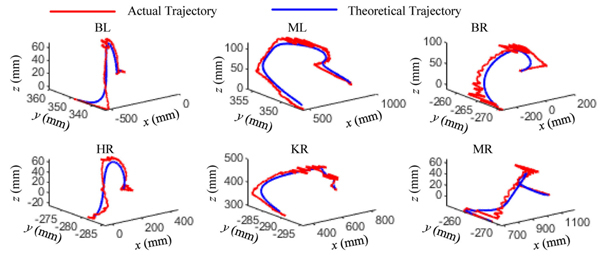
Comparison curve between theoretical values (blue) and actual values (red).
Environmental Adaptability and Other Performance Experiments: Experiments demonstrated good walking performance on ice, snow, mud, and sand. The robot successfully navigated a 10.77° slope. In simulated leg entrapment tests, it successfully freed itself and passed a rocky riverbed test. In turning experiments, two turning gaits operated stably. In lateral movement experiments, it moved normally under a 5kg load. Load capacity tests determined a maximum payload of 20kg.
Environmental adaptability and other performance experiments
NOKOV motion capture system provided crucial pose data for this study, helping to verify the differences between simulated and actual robot movements and proving the correctness of the theoretical analysis.
Authors’ Profile
JU Zhongjin (Co-first author), Ph.D. candidate in Mechatronic Engineering, School of Mechanical Engineering, Yanshan University. Research interests: Reconfigurable legged robot structures, legged robot stability control.
WU Rui (Co-first author), Master's graduate, School of Mechanical Engineering, Yanshan University. Current position: Superconducting magnet design at Western Superconducting. Research interest: Multi-legged robot configuration design.
GUO Dameng, Master's candidate in Mechatronic Engineering, School of Mechanical Engineering, Yanshan University. Research interest: Multi-legged wall-climbing robots.
XU Yundou (Corresponding author), Professor, Ph.D. supervisor, Department Head, School of Mechanical Engineering, Yanshan University. Research interests: Special robots, deployable mechanisms, parallel-serial hybrid mechanisms.



