This paper proposes a physics-informed residual network–based method for magnetic dipole model correction and high-accuracy localization, achieving robust sim-to-real transfer. NOKOV motion capture system is employed to evaluate the accuracy and robustness of the proposed magnetic localization algorithm in real-world environments.
At IROS 2025, the team led by Academician Shuxiang Guo from Southern University of Science and Technology presented the paper Physics-Informed Residual Network for Magnetic Dipole Model Correction and High-Accuracy Localization. This work proposes a Physics-Informed Residual Network (PIRNet) for correcting the magnetic dipole model and achieving high-precision magnetic localization, enabling robust transfer from simulation to real-world scenarios. The proposed method provides a high-accuracy and low-cost localization solution for magnetic navigation robots, demonstrating significant application potential in minimally invasive surgical navigation and industrial inspection.
NOKOV motion capture system is used to assist in evaluating the accuracy and robustness of the proposed magnetic localization algorithm under real-world conditions.
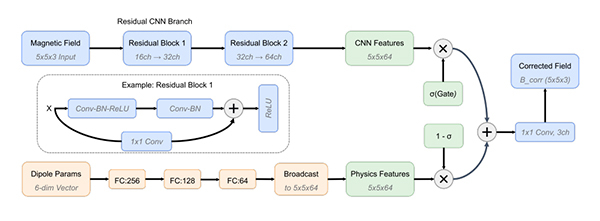
Architecture of Physics-Informed Residual Network
Magnetic localization is a key technology for magnetically navigated capsule endoscopes and magnetically driven minimally invasive surgical robots. Achieving high-accuracy magnetic localization relies on establishing an accurate magnetic field model of the magnetic source. However, the classical magnetic dipole model exhibits significant deviations in near-field conditions, resulting in degraded localization accuracy, especially when the magnet is close to the sensors (at distances less than eight times the magnet radius). In addition, real-world factors such as sensor noise, temperature drift, and environmental interference further exacerbate the discrepancy between model predictions and real measurements.
Although more refined analytical models can improve accuracy, they often incur substantially increased computational complexity, which limits their applicability in real-time scenarios.
To address the issues of model–data inconsistency, limited generalization capability, and real-time performance bottlenecks in existing approaches, this paper proposes a two-stage physics–data fusion–based magnetic localization calibration strategy. The main contributions are summarized as follows:
1. A physics-informed residual network (PIRNet) is designed to correct systematic deviations in simulated data using magnetic dipole theory as a prior;
2. An interpolable lookup table optimization method is employed, which combines distance-weighted trilinear interpolation with spherical linear interpolation (Slerp) to achieve sub-millimeter rapid matching.
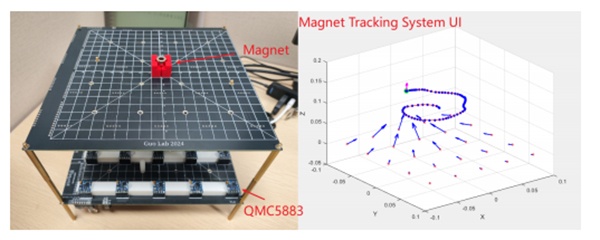
Experimental platform comprising a magnetometer array (QMC5883), a scale plate, and an annular NdFeB magnet (grade: N45, outer radius ro = 10mm, inner radius ri = 5mm, and length L = 10mm). The direction and length of the blue arrow in the UI represents the direction and strength of the magnetic field detected by each sensor.
The effectiveness of the proposed method is validated using a two-stage strategy combining simulation pre-training and real-world data fine-tuning. First, 58,320 simulated samples are generated within the workspace based on magnetic dipole theory, with synthetic noise added to simulate sensor non-idealities. These samples are used to pre-train the PIRNet, enabling it to learn the underlying physical characteristics of the magnetic field.
Subsequently, a small set of real-world data comprising 288 spatial configurations (14,400 samples in total) is collected, of which most samples (11,520) are used for fine-tuning. This strategy reduces the requirement for real-world data by more than 90%, achieving efficient sim-to-real transfer.
In real-world static experiments, the corrected system achieves an average positioning error of 1.15 mm and an orientation error of 1.01°. In dynamic experiments, the average tracking error is 0.7 mm with an orientation error of 1.07°. NOKOV motion capture system provides sub-millimeter ground-truth pose measurements in real time, enabling accurate evaluation of the proposed algorithm’s performance in real environments.
Compared with the traditional Levenberg–Marquardt (LM) algorithm and end-to-end deep learning solutions, the proposed method maintains real-time performance (22.4 FPS) while ensuring physical interpretability and robustness to environmental interference. Moreover, it requires significantly fewer real-world training samples than purely data-driven approaches.
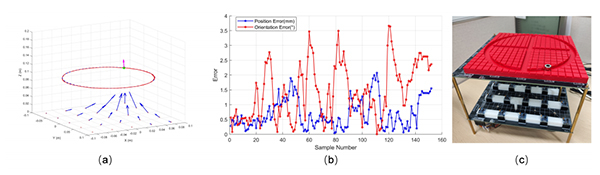
Repeated accuracy testing. (a) Three-dimensional trajectory reconstruction of the magnet captured by the control software, with blue and red curves representing the actual manual displacement and real-time computational trajectory, respectively. (b) Tracking error of the magnet. (c) Experimental configuration for dynamic validation, featuring a magnet-constrained track system enabling manual trajectory execution.
NOKOV motion capture system provides sub-millimeter ground-truth pose data in real time to validate the accuracy and robustness of the proposed algorithm.
Miaozhang Shen is a master’s student in the Department of Electronic and Electrical Engineering and the Advanced Institute for Ocean Research at Southern University of Science and Technology. His research focuses on magnetic medical robotic systems.
Shuxiang Guo is an Academician of the Engineering Academy of Japan and a Chair Professor in the Department of Electronic and Electrical Engineering at Southern University of Science and Technology. His research interests include microrobotics, vascular inspection microsystems, medical and biological tele-operated micromanipulation systems, and intelligent underwater robots.
Chunying Li is an Assistant Professor and Master’s Supervisor at Southern University of Science and Technology. Her research interests include bio-inspired robots, amphibious robots, multi-robot cooperation, multi-sensor fusion, underwater communication, and cooperative localization and navigation.
Zixu Wang is a Postdoctoral Researcher in the Department of Electronic and Electrical Engineering at Southern University of Science and Technology. His research focuses on medical robotic systems for minimally invasive surgery and magnetically driven flexible robots.