Recently, the work by Prof. Xingguang Peng’s team from the School of Marine Science and Technology, Northwestern Polytechnical University, received the 2025 IEEE Robotics and Automation Letters (RA-L) Best Paper Award. The first author of the paper is Yalun Xiang, a Ph.D. student at the School of Marine Science and Technology.
The paper has been selected as one of only five Best Paper Award winners from among more than 1,700 papers published in RA-L during 2025, reflecting the outstanding contribution to the field of robotics and automation.
The award will be announced at the ICRA 2026 Award Ceremony, on June 4, 2026, 12:30–14:00 in Vienna, Austria.
Citation
Y. Xiang, J. Song, Z. Zheng, X. Lei and X. Peng, “Density-Driven Progressive Shape Formation for Swarm Robots in Dynamic Environments,” in IEEE Robotics and Automation Letters, vol. 11, no. 2, pp. 1186–1193, Feb. 2026, doi: 10.1109/LRA.2025.3640978.
Overview
The award-winning paper, titled “Density-Driven Progressive Shape Formation for Swarm Robots in Dynamic Environments,” presents a novel density-driven control framework for shape formation in swarm robotic systems. The method operates exclusively on local perception, without requiring communication or identity recognition among robots and targets.
In the real-world experiments, NOKOV motion capture system captured high-precision, real-time robot pose data, serving as a critical data source for swarm motion control and algorithm validation.
Conventional swarm shape formation methods typically rely on global communication, a centralized coordinator, robot identity recognition, or one-to-one target assignment. As the number of robots increases, these methods often face challenges such as high computational complexity, limited system robustness, and deployment difficulties.
1. A communication-free density-driven method for swarm shape formation
The research team systematically introduces a density field regulation mechanism into the problem of swarm robotic shape formation. With only local perception, robots can collectively construct the desired global shape, significantly reducing the dependence of large-scale swarm systems on communication and computational resources.
2. Progressive autonomous formation of swarm morphologies
The paper proposes a progressive shape formation mechanism. By adjusting a single reference density parameter, ρ₀, the swarm can smoothly and continuously transition among three morphological states: shape-surrounding formation, double-layer contour formation, and boundary-conformal formation.
This mechanism enables robot swarms to dynamically adjust coverage thickness and boundary adherence according to task requirements, providing a new approach for autonomous swarm control in complex dynamic environments.
3. Adaptive capability under dynamic swarm size changes
The method can adaptively adjust the swarm structure according to the number of participating robots. Even when robots are suddenly added, lost, or removed, the system can rapidly recover a stable formation while preserving shape fidelity and distribution uniformity, demonstrating strong robustness and scalability.
The results show that the proposed density-based control framework not only achieves static shape formation, but also robustly adapts to dynamic changes in swarm size, ensuring cooperative participation of robots regardless of insertion or loss.
1. Experiment Setup
The SwarmBang swarm experimental validation platform consists of up to about 100 desktop robots, NOKOV optical motion capture system, a video recording system, and a server. Each desktop robot has a size of 60 mm × 60 mm × 60 mm.
In this work, 50 robots were used for experimental validation. Each robot is equipped with two stepper motors with a maximum speed of 25 mm/s and a 2.4 GHz radio frequency module for wireless communication with the central server. The server is used to execute the shape formation algorithm, calculate the required velocity, and send control commands to the robots at fixed time intervals, Δt, via a customized communication protocol.
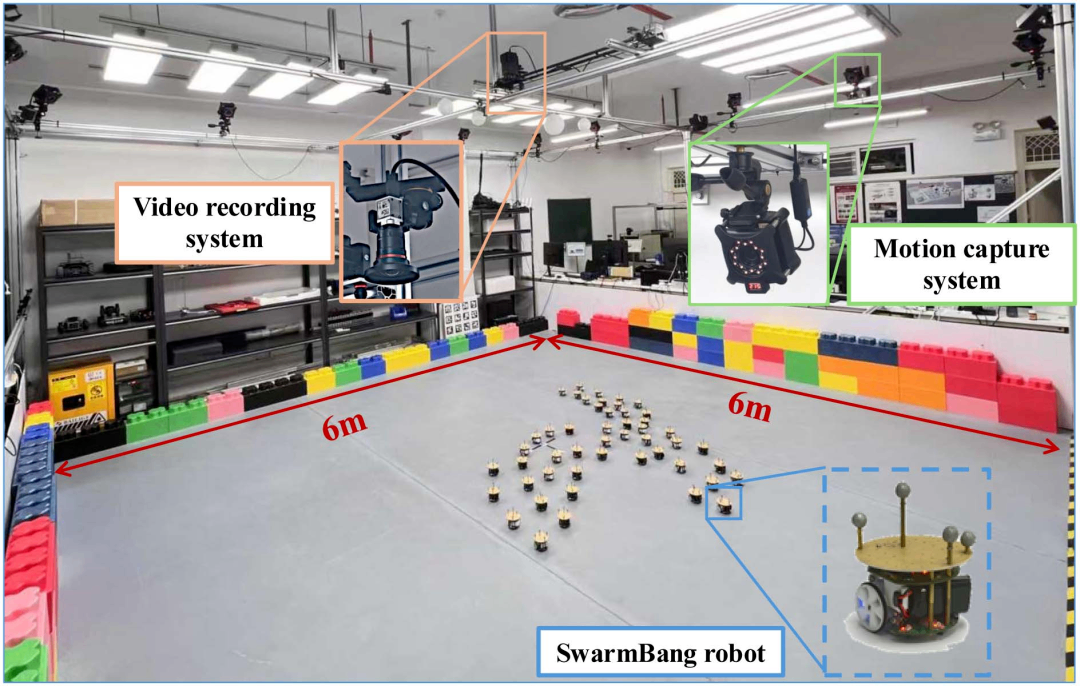
SwarmBang swarm experimental validation platform
2. Progressive Shape Formation of Swarm Robots
The results show that, by dynamically adjusting the density parameter ρ₀, the algorithm enables smooth transitions among shape-surrounding, double-layer contour, and boundary-conformal formations, demonstrating strong adaptability and scalability in practical applications.
3. Swarm Robotic Shape Formation Under Dynamic Robot Additions and Removals
The results demonstrate that the proposed algorithm can rapidly adapt to dynamic changes in swarm size, such as sudden robot removal or insertion, while preserving shape fidelity and distribution uniformity.
In the real-world experiments, NOKOV motion capture system captured high-precision, real-time robot pose data from 50 robots, serving as a critical data source for swarm motion control and algorithm validation.
Yalun Xiang is a Ph.D. student at the School of Marine Science and Technology, Northwestern Polytechnical University. His main research interests include swarm robotics, swarm shape formation, self-organized control, and swarm intelligence.
Jintao Song is a master’s student at the School of Information and Control Engineering, Xi’an University of Architecture and Technology. His main research interests include swarm robotics and swarm control algorithms.
Zhicheng Zheng is a Ph.D. student at the School of Marine Science and Technology, Northwestern Polytechnical University. His main research interests include swarm intelligence and swarm robotics.
Xiaokang Lei is an Associate Professor and master’s supervisor at the School of Information and Control Engineering, Xi’an University of Architecture and Technology. His main research interests include swarm robotics and swarm intelligence.
Xingguang Peng (corresponding author), is a Professor and Ph.D. supervisor at the School of Marine Science and Technology, Northwestern Polytechnical University. His main research interests include swarm intelligence, evolutionary computation, machine learning, and their applications in unmanned systems, especially unmanned swarms.