
This research proposes a new algorithm for robust state estimation of legged robots, the dual beta-Kalman Filter (Dual β-KF), which takes the robot's foot slippage velocity and changes in leg length into account, demonstrating significantly outperformed robustness over state-of-the-art algorithms.
NOKOV motion capture system is used in real-world experiments to provide the ground-truth pose of the legged robot, supporting the validation of the estimation accuracy and robustness of the algorithm presented in this paper.
Citation
T. Zhang, W. Cao, C. Liu, T. Zhang, J. Li and S. E. Li, "Robust State Estimation for Legged Robots With Dual Beta Kalman Filter," in IEEE Robotics and Automation Letters, vol. 10, no. 8, pp. 7955-7962, Aug. 2025, doi: 10.1109/LRA.2025.3579619.
Research Background
Existing state estimation algorithms for legged robots that rely on proprioceptive sensors often overlook foot slippage and leg deformation in the physical world, leading to large estimation errors. To address this limitation, this article proposes a dual robust estimation framework Dual β-KF. This framework includes a statics-based parameter filter capable of estimating the leg length parameter independently from state variables, and a state filter β-KF, which is robust to outliers caused by foot slippage, for estimating the robot’s state.
Contributions of This Work
For the purpose of accurately acquiring leg length parameters, the research team propose a dual estimation framework that simultaneously estimates the leg length using a parameter filter and the robot’s state using a state filter. To prevent the accumulation of errors in this dual structure, the team construct a leg static measurement model for the parameter filter, which estimates leg length solely through joint torques and foot contact forces, without relying on state information.
Due to the low frequency of foot slippage, it can be regarded as outliers of the measurement data. To mitigate the impact of these outliers, the team reinterpret the Kalman filter as a solution to a maximum a posteriori (MAP) estimation problem based on Kullback-Leibler (KL) divergence. By redefining the estimation loss using a more robust β-divergence, the team develop the β-Kalman filter (β-KF), which reduces the influence of foot slippage on estimation accuracy.
Combining the dual estimation framework with the β-KF, the team propose a new algorithm for robust state estimation for legged robots called dual beta Kalman filter(Dual β-KF). Experiments on both Gazebo simulation and a real-world Unitree GO2 robot demonstrate that the proposed method significantly improves estimation accuracy compared to state-of-the-art proprioceptive state estimation algorithms.
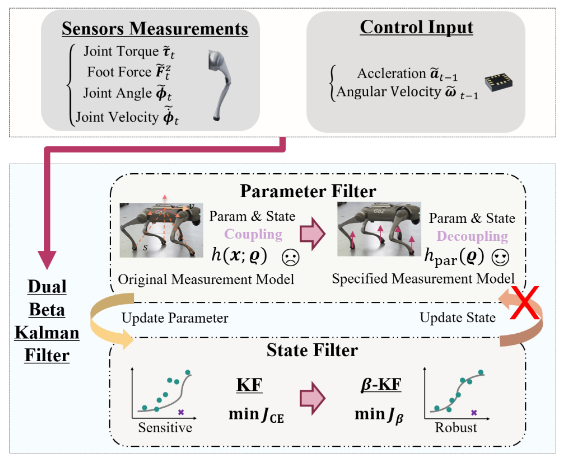
Figure 1:Framework overview of the Dual β-K. Proprioceptive sensor data are input to the Dual β-KF, where a state-independent parameter filter first estimates the leg length parameters. These estimates are then used by a robust state filter to determine the robot’s state.
1. Experiment Setup
In the experiments, the team first test the algorithms in the Gazebo simulation, and second, conduct the real-world experiment on a Unitree GO2 robot.
To fairly and clearly verify the effectiveness of the Dual β -KF, the team conduct thorough validations of its two components: the β-KF and the statics-based parameter filter. For the validation of β-KF, the team select QEKF, quaternion-based EKF, and UKF-OR, UKF with outlier rejection, as baselines. Additionally, the team include IEKF, Iterated EKF, which is equivalent to iteratively solving for the optimal MAP estimate, and Weight-KF, as ablation experiments to demonstrate that the robustness of the β-KF is not due to the MAP estimate or the scale of β divergence. To evaluate the effect of the statics-based parameter filter, the team compare Dual β-KF with Dual QEKF and QEKF with Kinematic batch calibration(shown as QEKF with [11] in Table 1).
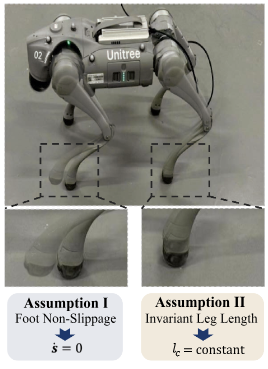
Figure 2:Legged robot used for real-world experiments. Foot slippage and dynamic changes in leg length occur during the locomotion of legged robots.
2. Real-world Experiments
In real-world experiments, the legged robot moves in a trot gait on flat ground, and sensor data is collected during the movement, including one IMU, 12 joint encoders, joint torque sensors, and four foot contact force sensors.
NOKOV motion capture system provides the robot’s ground-truth trajectory, which is used for comparison with the algorithms’ estimated trajectory.

Figure 3:NOKOV motion capture system used to provide the robot’s ground-truth trajectory.
3. Comparison Results
In the validation of β-KF, as expected, the baseline QEKF exhibits the largest estimation error due to its lack of handling for an inaccurate measurement model. Conversely, the UKF-OR can effectively suppress measurement outliers by fine-tuning the threshold, however it fails to utilize some useful information for state updates, causing larger errors at certain times. In contrast, the proposed β-KF automatically assigns low weights to outliers, allowing for better utilization of measurement information. As a result, the β-KF significantly outperforms the IEKF and Weight-KF, proving that the robustness of β-KF does not stem from the MAP estimate or the scale of new divergence.
In the validation of the dual framework, Dual QEKF not only outperforms QEKF, but also outperforms QEKF with Kinematic batch calibration(shown as QEKF with [11] in Table 1), demonstrating that the proposed dual framework, which accounts for real-time leg length variations by estimating it at each step, is superior to using a pre-calibrated fix leg length. Notably, the Dual β-KF achieves the best estimation accuracy, providing over a 40% improvement compared to the baseline QEKF.
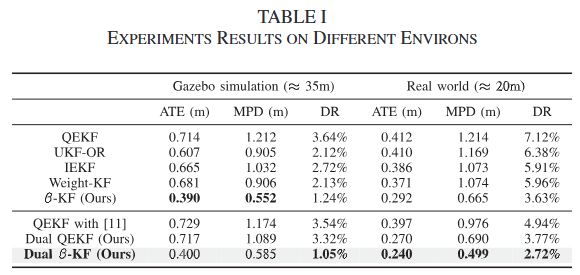
Table 1:Experiments results on different environments
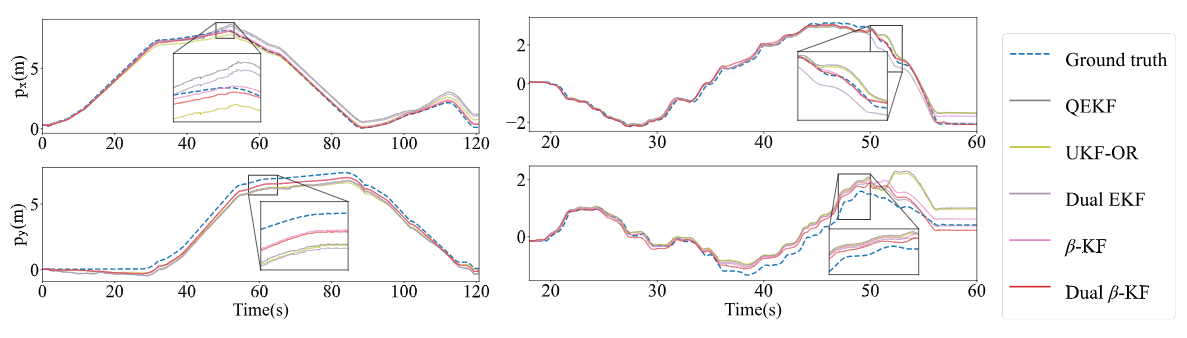
Figure 4:Position estimation results for different algorithms in the simulation (left) and the real-world experiment (right). For clarity, this article only shows the curves for the proposed algorithms and the two baseline filters. It can be observed that the proposed algorithms’ estimated trajectory is closer to the true trajectory.
NOKOV motion capture system is used in real-world experiments to provide the ground-truth pose of the legged robot, supporting the validation of the estimation accuracy and robustness of the algorithms presented in this paper.
Tianyi Zhang,PhD candidate at the School of Vehicle and Mobility, Tsinghua University. Research focus: robot state estimation and control, reinforcement learning, etc.
Wenhan Cao, postdoctoral fellow at the National University of Singapore. Research focus: state estimation, robot learning, etc.
Chang Liu, assistant professor and PhD supervisor at the School of Advanced Manufacturing and Robotics, Peking University. Research focus: embodied intelligence, multi-robot collaboration.
Tao Zhang, CEO of SunRisingAI Ltd. Research focus: embodied intelligence, robot systems.
Jiangtao Li, Chief Scientist at SunRisingAI Ltd. Research focus: embodied intelligence, robot systems.
Shengbo Li (corresponding author), professor and PhD supervisor at the School of Vehicle and Mobility and the College of AI, Tsinghua University. Research focus: autonomous vehicles, embodied intelligent robots, deep reinforcement learning, neural network design, optimal control and estimation, etc.



