













Multi-Agent Collaborative Control Experimental Platform
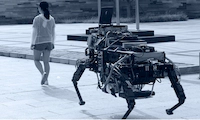
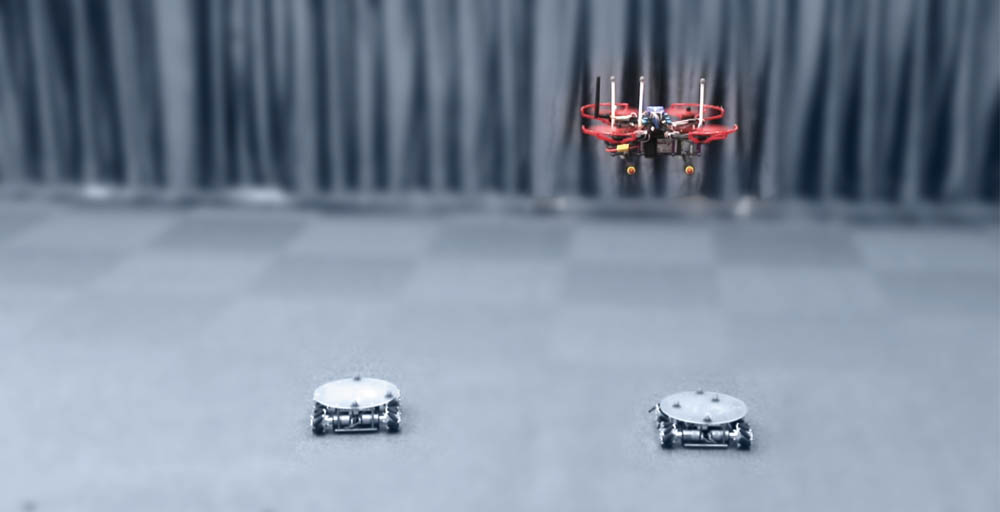
Innovation at Beijing Institute of TechnologyPioneering Collaborative Control: Leveraging the NOKOV Optical Motion Capture System, the Beijing Institute of Technology has developed a cutting-edge experimental platform. It facilitates collaborative control research for a heterogeneous array of agents, including UAVs and terrestrial robotic vehicles. Users can test and refine control algorithms while replicating complex military scenarios, such as synchronized air-ground surveillance and autonomous vehicle reconnaissance.

Capabilities of BIT's Multi-Agent Collaborative Control Platform
• Precision UAV Attitude Control
Customized capture components tailored to user specifications
• Accurate 3D position and orientation data acquisition
Dynamic Role Allocation for Agents. Optimal formation assembly from random initial positions using real-time NOKOV data. Paves the way for subsequent collaborative experiments
• Synchronized Air-Ground Operations
Scalable target tracking for extensive motion capture. User-friendly target management for complex simulations
NOKOV Optical Motion Capture System Features
• Six Degrees of Freedom (6DoF) Motion Capture Data
Collection of 3D spatial XYZ coordinates, Six Degrees of Freedom (6DoF), Yaw, Roll, Pitch, Euler Angles, etc., providing a coherent, smooth database for drone pose control and motion planning.
• Sub-Millimeter Data Precision
Superior accuracy to the sub-millimeter level, outperforming GPS and other common methods
• Extensive Secondary Development Interfaces
Data can be transmitted in VRPN format or through an SDK (C++ language) port, enabling communication with software platforms such as ROS, Labview, and Matlab (including Simulink) for further development.
• Efficient Rigid Body Configuration
In-Depth Case Analysis: Informative Comparisons: Evaluate the performance of optical motion capture versus UWB technology in our research Download Brochure for More Information.Collaborative Autonomous Construction by UAVs
Orchestrated by the School of Architecture, Tongji UniversityReal-time 6DoF data integration into flight control for precise local positioning. Strategic trajectory planning enabling synchronized construction tasks.
• Scholarly Contributions:
Featured publications from Tongji University - "Preliminary Exploration of Autonomous Construction Technology for Discrete Structures Based on UAVs" by Guo Zhe, Lu Ming, Wang Xiang in Architectural Techniques, 2019.09
Explore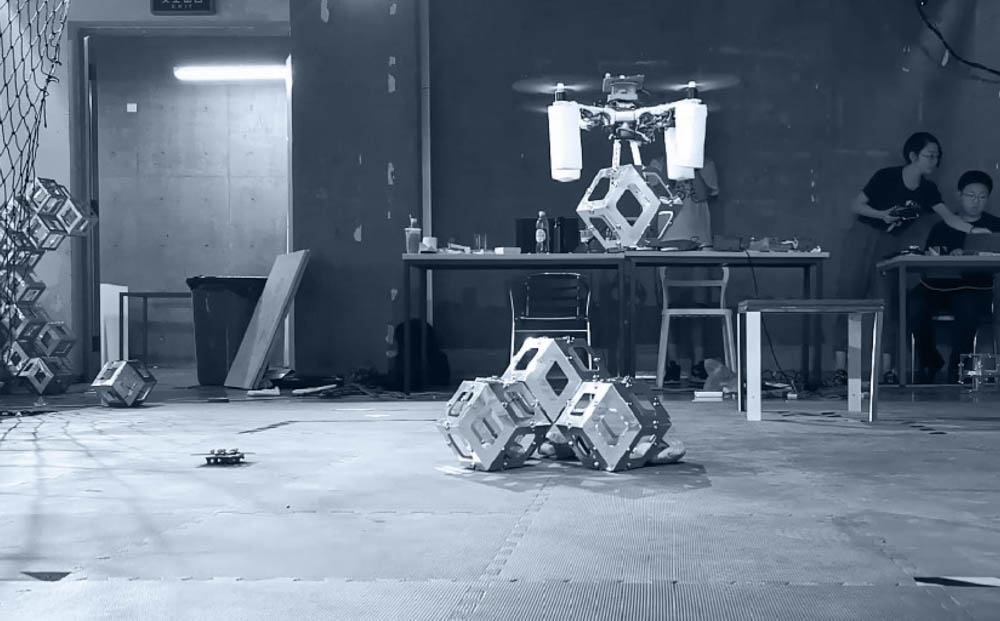


MARS Series Motion Capture Cameras
- • Meeting all-around customer needs. Resolutions ranging from 2.2 to 12 megapixels, frequencies covering from 180Hz to 340Hz comprehensively.
- • High precision, low latency, designed specifically for the field of scientific research, it is currently a very cost-effective optical motion capture solution.
- • Applicable models: Mars 2H, Mars 4H, Mars 12H