English
中文
日本語
Русский
Applications
Robotics & Engineering
Drones, Swarms &
Mobile Robots
Robotic Arms
Exoskeletons
& Wearables
Bionic Robots
Robotic
Hands
Marine &
Underwater
Applications
Medical
Robots
Displacement
Measurement
Virtual Reality
Cost-Effective, Low-Latency, High-Precision VR Tracking
Life Sciences
High Precision, Flexible Motion Capture and Gait Analysis Tools
Entertainment
For Game CG, VFX, 3D Animation, and Motion Capture Studios
Products
Main Portfolio
Cameras
Mars Series
Underwater Cameras
Pluto Series
Orbit Series
Software
Sync Device
Accessories
AI MoCap
Markerless Mocap
Packages
VRT Tracking Package
Robotics
Crazyflie & Crazyswarm
Developer Tools
Multi-modal Data Capture & Management
Integrations
Force Plate
Instrumented Treadmills
EEG
EMG
Plantar Pressure Measurement
Facial Motion Capture
Finger Tracking Glove
Reference Cameras
Eye-trackers
Wearable Metabolic Systems
Biomechanics Software
View All
Support
Support
Documentation
Downloads
FAQs
Resources
News & Events
Case Studies
Motion Capture
Essentials
Related Papers
IROS 2025
Special Section
About
About us
Contact
What is
Motion Capture?
Distributors
Capturing Motion,
Crafting Stories
Explore Our Case Studies: Transforming Motion into Masterpieces Across Industries
All
Robotics & Engineering
Entertainment
Life Sciences
Virtual Reality
Parallel Robot
Wheel-legged Robot
Agricultural Robot
Humanoid Robot
Soft Robot
Inspection Robot
Medical Robot
Bionic Robot
UAV/UGV
Exoskeleton
Robotic Arm
Mobile Robot
Multi-robot system
Wearables
Continuum robot
Human Body
Animals
SLAM
Obstacle/Collision Avoidance
Formation/Swarm
Manipulation
Navigation
Localization
Perception
Control
Dexterous Hand
Human-Robot Interaction/Collaboration
Vision
Marine&underwater
Cooperation
Displacement
Learning
Teleoperation
Haptics
End-effectors
Motion planning
Trajectory planning
Path Planning
Hand Mocap
Robot‐assisted Surgery
Special
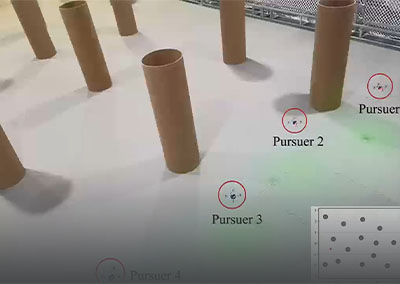
IROS 2025 Emergent Cooperative Strategies for Pursuit-Evasion in Cluttered Environments: A Knowledge-Enhanced Multi-Agent Deep Reinforcement Learning Approach
National University of Defense Technology (NUDT)
2025-09-04
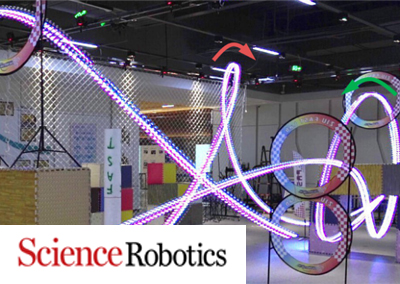
Science Robotics: Unlocking aerobatic potential of quadcopters: Autonomous freestyle flight generation and execution
School of Control Science and Engineering, Zhejiang University
2025-04-22
Mean-Shift Shape Formation of Multi-Robot Systems Without Target Assignment
Beihang University, China
2024-10-04
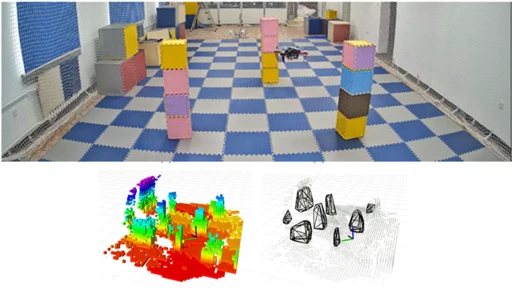
Efficient Representation of Dynamic Environments for UAVs: Continuous Occupancy Mapping in Dynamic Environments Using Particles
2024-09-29
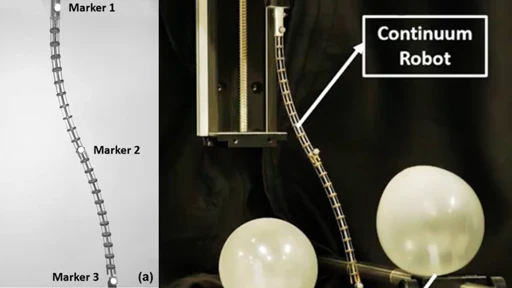
Efficient Trajectory Planning for Continuum Robots (based on RRT*)
Southern University of Science and Technology
2024-06-04
Dynamic Obstacle Avoidance for Cable-Driven Parallel Robots
Harbin Institute of Technology (Shenzhen)
2024-03-07
Centralized Trajectory Planning for Multi-robot Formations: a Continuous-time Gaussian Process Based on Probabilistic Inference
Harbin Institute of Technology
2024-02-29
Multi-Target Encirclement with Collision Avoidance via Deep Reinforcement Learning using Relational Graphs
Institute of Automation, Chinese Academy of Science
2024-01-16
A New Algorithm for Multi-UAV Online Path Planning
Collage of Automation Engineering, Nanjing University of Aeronautics and Astronautics (NUAA)
2023-11-08
Research on Autonomous Navigation of Quadcopter Aircraft Based on Map-Based Planning Framework
Harbin Institute of Technology
2023-06-29
Dual-arm robot leads a new era of man-machine integration
School of Mechatronic Engineering and Automation, Shanghai University
2021-08-23
Using optical positioning system to realize multi-agent formation obstacle avoidance
Institute of Automation, Chinese Academy of Sciences
2021-08-23
By using this site, you agree to our
terms
, which outline our use of cookies.
CLOSE
×
Contact us
We are committed to responding promptly and will connect with you through our local distributors for further assistance.
Engineering
Virtual Reality
Life Sciences
Entertainment
I would like to receive a quote
Submit
Beijing NOKOV Science & Technology Co., Ltd (Headquarter)
Room820, China Minmetals Tower, Chaoyang Dist., Beijing
info@nokov.cn
+ 86-10-64922321
Capture Volume
*
Objective
*
Full Bodies
Drones/Robots
Others
Quantity
Camera Type
Pluto1.3C
Mars1.3H
Mars2H
Mars4H
Underwater
Others/I do not know
Camera Count
4
6
8
12
16
20
24
Others/I don't know